
Die Newtonschen Gesetze
Zusammenfassung:
Diese Vorlesung behandelt die Newtonschen Gesetze und ihre Rolle in der Dynamik der Körper. Es wird untersucht, wie Masse und Geschwindigkeit den linearen Impuls bestimmen, und die drei Gesetze werden beschrieben: die Trägheit, die den Bewegungszustand in Abwesenheit äußerer Kräfte aufrechterhält, der Zusammenhang zwischen Kraft und Beschleunigung sowie die Wechselwirkung von Aktion und Reaktion zwischen Körpern. Anhand von Beispielen wie dem Gleiten auf Ebenen und der Bewegung von Pendeln wird die Anwendung dieser Gesetze veranschaulicht, was schließlich mit praktischen Übungen zur Festigung des Lernens abschließt.
Lernziele:
Am Ende dieser Vorlesung wird der Studierende in der Lage sein:
- Die drei Newtonschen Gesetze zu verstehen und ihre Anwendung in der Dynamik der Körper zu erläutern.
- Die Newtonschen Gesetze anzuwenden, um Probleme der Dynamik zu analysieren und zu lösen.
- Die Beziehung zwischen Masse, Geschwindigkeit und linearem Impuls zu identifizieren.
- Die Bedeutung von Inertialsystemen in der Untersuchung der Dynamik zu analysieren.
- Zu erklären, wie das zweite Newtonsche Gesetz Kraft und Beschleunigung miteinander verknüpft.
- Den Begriff der trägen Masse zu beschreiben und wie man diese zwischen verschiedenen Körpern vergleicht.
INHALTSVERZEICHNIS
Einführung
Die Newtonschen Gesetze über die Dynamik der Körper
Wie benutzt man die Newtonschen Gesetze?
Lösung von Problemen mit den Newtonschen Gesetzen
Einführung
Wenn die Kinematik, die wir in den vorherigen Vorlesungen behandelt haben, es uns erlaubt, die Bewegung der Körper zu beschreiben, so gewinnen wir durch die Newtonschen Gesetze die Dynamik, die es uns ermöglicht, über die Ursachen der Bewegung (oder Zustandsänderungen der Bewegung) nachzudenken. Hier sind die Konzepte von Position und Zeit wichtig, weil wir in deren Begriffen Geschwindigkeit und Beschleunigung definieren; hinzu kommt jedoch ein weiteres Element: die Masse.
Die Masse ist wichtig, um den Bewegungszustand der Körper oder den linearen Impuls zu definieren. Man sagt, dass der lineare Impuls eines Körpers, \vec{p}, das Produkt aus Masse und Geschwindigkeit ist.
\Large \vec{p}=m\vec{v}
Der Bewegungszustand ist die Schlüsselidee hinter den Newtonschen Gesetzen.
Die Newtonschen Gesetze über die Dynamik der Körper
Erstes Gesetz (Trägheitsgesetz):
In Abwesenheit äußerer Einwirkungen behalten alle Körper ihren Bewegungszustand bei.
Das erste der Newtonschen Gesetze hat die Genialität, zwei Fragen von tiefgreifender Bedeutung für die Physik aufzustellen. Die erste und offensichtlichste: es etabliert den linearen Impuls als eine erhaltene Größe; und die zweite, ebenso wichtige, aber viel implizitere, ermöglicht es uns, festzulegen, was ein Inertialsystem ist.
Es gibt viele Möglichkeiten, einen Beobachter zu definieren, aber unter all diesen gibt es eine besondere Klasse, die wir Inertialbeobachter nennen. Der Unterschied besteht darin, dass aus der Perspektive eines Inertialbeobachters in Abwesenheit einer äußeren Einwirkung der Bewegungszustand der Körper eine erhaltende Größe ist.
Was unterscheidet einen Inertialbeobachter von einem, der es nicht ist?
Der Unterschied besteht darin, dass aus der Perspektive eines Inertialbeobachters in Abwesenheit einer äußeren Einwirkung der Bewegungszustand der Körper eine erhaltende Größe ist.
Zweites Gesetz (Kraft und Masse):
Aus der Perspektive eines Inertialbeobachters ist die von einer äußeren Ursache auf einen Körper ausgeübte Kraft gleich der Änderung seines Bewegungszustandes.
Mit anderen Worten, wenn auf einen Körper eine Kraft \vec{F} ausgeübt wird, dann gilt.
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
Die bekannte Beziehung „Kraft gleich Masse mal Beschleunigung“, \vec{F}=m\vec{a}, ist nichts anderes als eine Konsequenz des Zweiten Newtonschen Gesetzes, die sich aus den Eigenschaften der Ableitungen und der Massenerhaltung ergibt.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
In diesem letzten Schritt wurde berücksichtigt, dass dm/dt=0, da angenommen wird, dass weder Masse hinzugefügt noch entfernt wird, und d\vec{v}/dt ist die Definition der Beschleunigung.
Träge Masse
Das zweite der Newtonschen Gesetze ermöglicht es außerdem, den Begriff der Masse zu präzisieren. Hier erscheint sie als eine Proportionalitätskonstante zwischen Kraft und Beschleunigung. Je größer die Masse, desto größer muss die ausgeübte Kraft sein, um die gleiche Beschleunigung zu erreichen; als Folge davon wird die Masse als Maß für die Trägheit der Körper verstanden, daher der Name träge Masse. Wenn auf zwei Körper, die sich relativ zu einem Inertialbeobachter in Ruhe befinden, die gleiche Kraft wirkt (ohne Materieaustausch), dann gilt
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
Daraus können wir die Massen der Körper durch das Verhältnis der Beträge der Beschleunigungen vergleichen
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Daher, wenn m_2 ein „Kilogramm-Standard“ wäre, genügt es, den Quotienten \|\vec{a}_2\|/\|\vec{a}_1\| zu betrachten, um zu wissen, wie viele Kilogramm m_1 hat.
Drittes Gesetz (Aktion und Reaktion):
Wenn ein Körper A eine „Aktionskraft“ auf einen anderen Körper B ausübt, dann übt B eine „Reaktionskraft“ auf A aus, die gleich groß ist, jedoch in entgegengesetzter Richtung wirkt.
Das dritte Newtonsche Gesetz erlaubt es nicht nur, präziser über Kräfte zu sprechen, sondern stellt auch ausdrücklich fest, dass die äußeren Agenten, die eine Kraft ausüben, ebenfalls physikalische Objekte sind, die ihr unterliegen:
- Der äußere Agent ist ein physikalisches Objekt, das von Kräften beeinflusst werden kann.
- Kräfte treten niemals isoliert auf, sondern entstehen paarweise, sogenannte „Aktions-Reaktions-Paare“, und die Vektorsumme dieser Paare ist immer null.
- Aktions-Reaktions-Paare treten stets an verschiedenen Körpern auf, sodass die Gesamtkraft auf einen Körper nicht notwendigerweise null ist.
Da die Aktions-Reaktions-Paare stets entlang einer Geraden wirken, führt dies zu dem, was wir später als Erhaltung des Drehimpulses kennenlernen werden.
Abgesehen davon besagt das dritte Newtonsche Gesetz implizit noch einige weitere Dinge:
- Damit eine nicht-null Netto-Kraft auf einen Körper ausgeübt werden kann, ist mindestens ein zweites Objekt erforderlich.
- Aktion und Reaktion treten gleichzeitig auf. Da zwei Körper über Distanz interagieren können (durch Gravitation oder Elektromagnetismus), muss es in der Mechanik nach Newton notwendigerweise eine Möglichkeit geben, Informationen von einem Punkt zu einem anderen mit unendlicher Geschwindigkeit zu übertragen. Wir wissen, dass so etwas unmöglich ist, da gemäß der speziellen Relativitätstheorie die maximale Geschwindigkeit die des Lichts im Vakuum ist, sodass wir sagen, dieses dritte Gesetz sei eine Annäherung an die Realität.
Wie benutzt man die Newtonschen Gesetze?
Um zu verstehen, wie die Newtonschen Gesetze so angewendet werden, dass ihre Bedeutung klar wird, ist es am besten, auf Beispiele zurückzugreifen, die auf konkreten Situationen basieren, sowie auf die Konstruktion von Freikörperdiagrammen.
Freikörperdiagramme
Ein Freikörperdiagramm ist ein schematisches Bild, in dem wir die Kräfte darstellen, die auf einen Körper wirken. Basierend auf dem, was wir über das Gewicht besprochen haben, können wir die folgenden Beispiele von Freikörperdiagrammen konstruieren.
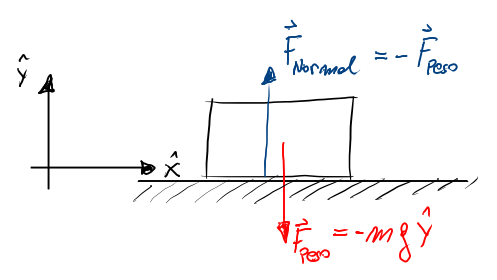
Ein Körper auf einer horizontalen Ebene
Aufgrund der Schwerkraft erfährt jeder Körper mit Masse eine Kraft, die zum Boden gerichtet ist. Durch das zweite Newtonsche Gesetz sehen wir, dass diese Kraft durch das Produkt der Masse und der Erdbeschleunigung \vec{g}=-g\hat{y}, gegeben ist, wobei g=9,81[m/s^2].
\vec{F}_{peso}=m\vec{g} = -mg\hat{y}
Das, was wir als „das Gewicht“ eines Körpers verstehen, ist in Wirklichkeit der Betrag dieser Gewichtskraft, die wir gerade gesehen haben.
{peso}=\|\vec{F}_{peso}\|= mg
Wenn wir einen Block auf eine horizontale Ebene legen, erscheint ein Aktions-Reaktions-Paar: dies sind die Gewichtskraft und die Normalkraft. Diese Kräfte sind gleich groß, aber entgegengesetzt gerichtet, sodass die Vektorsumme der Kräfte auf den Körper null ist und folglich sein Bewegungszustand im Laufe der Zeit konstant bleibt.
Gleiten auf einer horizontalen Ebene
Stellen wir uns nun vor, dass der Block an ein Seil gebunden wird und wir ihn ziehen, wie im folgenden Freikörperdiagramm dargestellt:
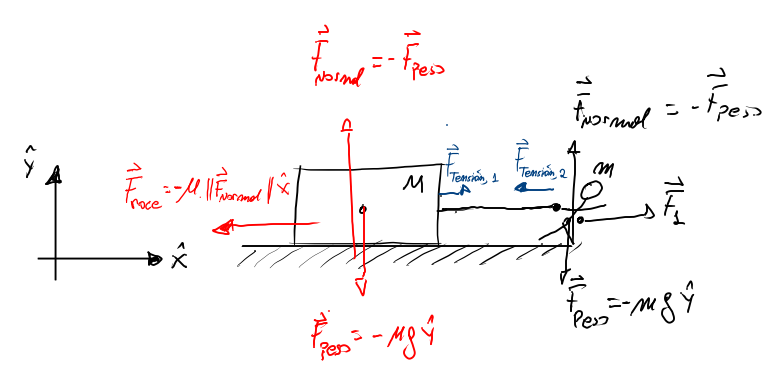
Hier beobachten wir das Auftreten von zwei Aktions-Reaktions-Paaren: einerseits die Paare, die mit den Gewichtskräften und Normalkräften der Körper verbunden sind; es gibt ein drittes Aktions-Reaktions-Paar, das mit den Enden des Seils verbunden ist, mit dem das Subjekt den Block zieht; und schließlich ein Paar, das mit der ausgeübten Kraft \vec{F}_1 und der Reibungskraft \vec{F}_{roce}, verbunden ist, mit einem Maximalwert von \mu\|\vec{F}_\textnormal{normal}\|.
Reibungskoeffizient und Reibungskräfte
Hier ist \mu der Reibungskoeffizient, der den Widerstand gegen das Gleiten zwischen zwei Oberflächen ausdrückt; der Reibungskoeffizient hat zwei Versionen: eine kinetische (\mu_c) und eine statische (\mu_e). Die statische Reibung tritt auf, wenn der Körper in Ruhe bleibt, während die kinetische Reibung auftritt, sobald der Körper zu gleiten beginnt.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Körper in Ruhe} \\ \\ \mu_c & ;& \textnormal{Körper in Bewegung} \end{array}\right. & ; & \textnormal{Wobei } \mu_c \leq \mu_e\end{array}
Die Reibungskraft wirkt der Bewegung des Körpers, auf den sie einwirkt, entgegen und kann (in vereinfachter Form) durch den folgenden Ausdruck modelliert werden:
\vec{F}_\textnormal{roce} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{normal}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{normal}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{normal}\| \lt \|\vec{F}\| \end{array} \right.
Wenn die ausgeübte Kraft kleiner oder gleich der maximalen statischen Reibung ist, bleibt der Körper in relativer Ruhe zum Boden. Wenn die ausgeübte Kraft größer als die statische Reibung ist, dann beginnt sich der Körper zu bewegen und die Reibung wird kinetisch; die Nettokraft auf den Körper ist daher: \vec{F}_{neta} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{normal}\|\hat{x}, und folglich bewegt er sich mit einer Beschleunigung \vec{a} = \vec{F}_{neta}/M. Wenn sich der Körper einmal in Bewegung befindet und die ausgeübte Kraft gleich der kinetischen Reibung ist, bewegt sich der Körper mit konstanter Geschwindigkeit.
Gleiten auf einer schiefen Ebene
Wenn ein Objekt auf einer schiefen Ebene gleitet mit einem Winkel \alpha, ergibt sich folgendes Kraftdiagramm:
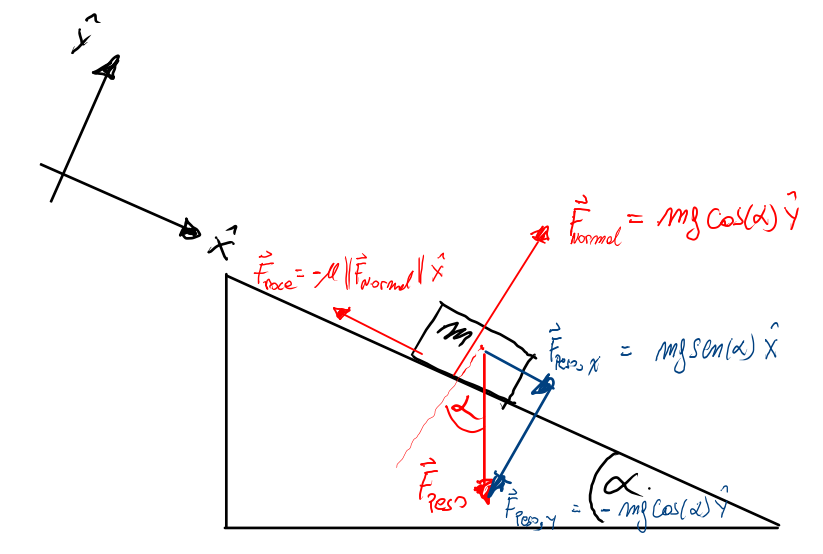
Hier wurde aus Gründen der Zweckmäßigkeit ein Bezugssystem so gewählt, dass die horizontale Koordinate mit der Gleitfläche ausgerichtet ist. In diesem Schema wird die Gewichtskraft in zwei Komponenten zerlegt: eine parallele und eine senkrechte zur Bewegung.
- Parallele Komponente: \vec{F}_{\textnormal{peso},x}=mg\sin(\alpha)\hat{x}
- Senkrechte Komponente: \vec{F}_{peso,y}=-mg\cos(\alpha)\hat{y}
Die Reibungskraft tritt als Reaktion auf die zur Bewegung parallele Komponente der Gewichtskraft auf, und die Normalkraft als Reaktion auf die senkrechte Komponente der Gewichtskraft. Wenn die horizontale Komponente der Gewichtskraft die maximale statische Reibung übersteigt, dann ändert sich der Bewegungszustand des Blocks mit einer Beschleunigung
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Hängende Masse
Eine Masse, die an einem Seil hängt, das an einer Decke befestigt ist und die in Ruhe bleibt, hat folgendes Freikörperdiagramm:
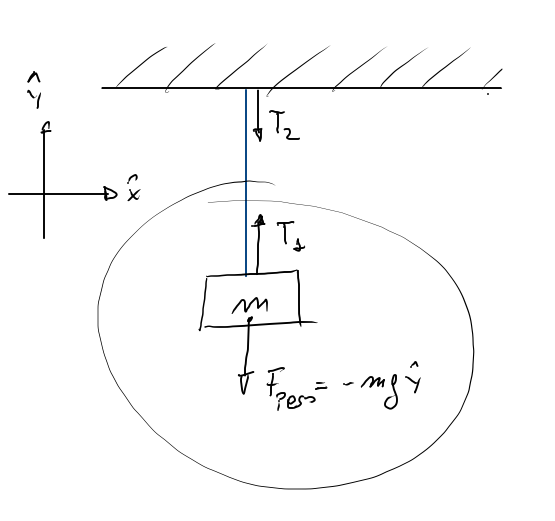
Eine Masse, die an einem Seil hängt, das an einer Decke befestigt ist und in Ruhe bleibt, hat folgendes Freikörperdiagramm:
Am Seil wirken ein Kraftpaar, das wir „Spannungen“ nennen; wenn das Seil als unelastisch angenommen wird, sind diese Kräfte gleich groß und entgegengesetzt. Auf den Block wirkt ebenfalls ein Kraftpaar: das Gewicht und die Seilspannung. Wenn der Block hängend in Ruhe bleibt, dann sind Gewicht und Spannung entgegengesetzt und von gleicher Größe. Es gibt eine vierte Kraft, die hier nicht gezeigt wird, nämlich die, die das Seil an der Decke befestigt; das Zusammenspiel dieser vier Kräfte bildet zwei Aktions-Reaktions-Paare.
Bewegung des einfachen Pendels
Eine Masse, die an einem unelastischen Seil hängt, das an einer Decke befestigt ist und um eine Gleichgewichtslage schwingt, wird aufgrund ihres Eigengewichts als einfaches Pendel bezeichnet. Unten sehen wir sein Freikörperdiagramm.
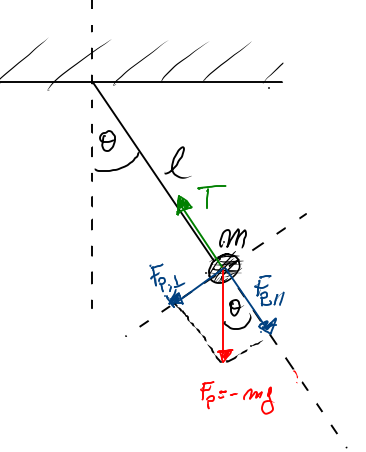
Da das Seil unelastisch ist, gilt, dass die radiale Beschleunigung null ist und folglich:
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
Für die Komponente senkrecht zum Seil hingegen gilt:
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
Aus diesem letzten Ausdruck lässt sich eine Differentialgleichung ableiten, mit der wir die Winkelposition \theta des einfachen Pendels in der Zeit modellieren können.
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
Die Herleitung dieser Gleichung und die Schlussfolgerungen, die wir daraus ziehen können, werden wir jedoch später im Detail betrachten.
Lösung von Problemen mit den Newtonschen Gesetzen
Verwenden Sie die Newtonschen Gesetze, um die folgenden Probleme zu lösen:
- Ein Block von 15[kg] wird auf eine horizontale Fläche gelegt. Zwischen dem Block und der Fläche wirken eine statische Reibung \mu_e=0,55 und eine kinetische Reibung \mu_c=0,31.
- Welche minimale Kraft ist erforderlich, damit sich der Block in Bewegung setzt?
- Berechnen Sie die Beschleunigung des Blocks, wenn er sich aufgrund der im vorherigen Punkt berechneten Kraft in Bewegung setzt.
- Ein Block von 12[kg] wird auf eine neigbare Ebene gelegt. Wenn der statische Reibungskoeffizient \mu_e=0,03 beträgt, bestimmen Sie den maximalen Neigungswinkel, bei dem der Block in Ruhe bleibt.
- Ein Block von 75[kg] bewegt sich mit konstanter Geschwindigkeit eine um 30^o gegen die Horizontale geneigte Ebene hinauf, aufgrund einer horizontal auf ihn ausgeübten Kraft. Wenn zwischen dem Block und der Oberfläche der Ebene ein kinetischer Reibungskoeffizient von \mu_c=0,21 besteht, bestimmen Sie die Größe dieser angewandten Kraft.
- Betrachten Sie zwei Massen m_1 und m_2, die durch ein unelastisches und masseloses Seil verbunden sind, das über eine Rolle läuft, wie in der Abbildung gezeigt. Berechnen Sie die Beschleunigung beider Massen.
- Ein flexibles Seil der Masse M hängt zwischen zwei Wänden und bildet an den Befestigungspunkten einen Winkel \alpha. Berechnen Sie die Seilspannung am tiefsten Punkt.
- Ein Körper der Masse m bewegt sich auf der Ebene x,y auf einem Kreis mit Radius R und konstanter Winkelgeschwindigkeit \omega. Berechnen Sie die auf die Masse wirkende Kraft.

