
Las Leyes de Newton
Resumen:
Esta clase aborda las leyes de Newton y su papel en la dinámica de los cuerpos. Se explora cómo la masa y la velocidad determinan el momentum lineal, y se describen las tres leyes: la inercia que mantiene el estado de movimiento en ausencia de fuerzas externas, la relación entre fuerza y aceleración, y la acción y reacción entre cuerpos. A través de ejemplos como el deslizamiento en planos y el movimiento de péndulos, se ilustra la aplicación de estas leyes, culminando con ejercicios prácticos para consolidar el aprendizaje.
Objetivos de Aprendizaje:
Al concluir esta clase el estudiante será capaz de:
- Comprender las tres leyes de Newton y su aplicación en la dinámica de los cuerpos.
- Aplicar las leyes de Newton para analizar y resolver problemas de dinámica.
- Identificar la relación entre la masa, la velocidad y el momentum lineal.
- Analizar la importancia de los observadores inerciales en el estudio de la dinámica.
- Explicar cómo la segunda ley de Newton relaciona la fuerza y la aceleración.
- Describir el concepto de masa inercial y cómo compararla entre diferentes cuerpos.
INDICE DE CONTENIDOS
Introducción
Las leyes de Newton sobre la Dinámica de los cuerpos
¿Cómo usar las leyes de Newton?
Resolución de problemas usando las leyes de Newton
Introducción
Si la cinemática que hemos revisado en las clases anteriores nos permiten describir el movimiento de los cuerpos, a través de las leyes de Newton obtenemos la dinámica que nos permite razonar sobre las causas del movimiento (o cambios de estado de movimiento). Aquí las ideas de posición y tiempo son importante, porque en términos de éstos definimos la velocidad y la aceleración, pero a estos se agrega uno adicional: la masa.
La masa es importante para definir el estado de movimiento de los cuerpos, o momentum lineal. Se dice que el momentum lineal de una cuerpo, \vec{p}, es el producto de la masa por la velocidad
\Large \vec{p}=m\vec{v}
El estado de movimiento es la idea clave detrás de las leyes de Newton.
Las leyes de Newton sobre la Dinámica de los cuerpos
Primera Ley (de Inercia):
En ausencia de agentes externos, todos los cuerpos mantienen constante su estado de movimiento.
La primera de las leyes de Newton tiene la genialidad de establecer dos cuestiones de profunda importancia para la física. La primera y más evidente: establece el momento lineal como una magnitud conservada; y la segunda e igualmente importante, pero mucho mas implícita, nos permite establecer lo que es un observador inercial.
Existen muchas formas de definir un observador, pero de entre todos ellos existe una clase especial que llamamos observador inercial. La diferencia radica en que, desde la perspectiva de un observador inercial, en ausencia de un agente externo el estado de movimiento de los cuerpos es una magnitud conservativa.
¿Qué distingue un observador inercial de otro que no lo es?
La diferencia radica en que, desde la perspectiva de un observador inercial, en ausencia de un agente externo el estado de movimiento de los cuerpos es una magnitud conservativa.
Segunda Ley (de Fuerza y Masa):
Desde la perspectiva de un observador inercial, la fuerza impresa por un agente externo sobre un cuerpo es equivalente a la variación de su estado de movimiento.
En otras palabras, si sobre un cuerpo se aplica una fuerza \vec{F} entonces se tendrá que.
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
La conocida relación «fuerza igual masa por aceleración», \vec{F}=m\vec{a}, no es más que una consecuencia de la Segunda Ley de Newton, que se obtiene a partir de las propiedades de las derivadas y de la conservación de la masa.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
En este último paso se ha considerado que dm/dt=0 porque se asume que no se está agregando ni quitando masa, y d\vec{v}/dt es la definición de la aceleración.
Masa inercial
La segunda de las leyes de Newton permite además precisar sobre el concepto de masa. Aquí figura como una constante de proporcionalidad entre la fuerza y la aceleración. A mayor masa, mayor tendrá que ser la fuerza impresa para lograr la misma aceleración; como consecuencia de esto, se entiende la masa como una medida de la inercia de los cuerpos y de ahí el nombre de masa inercial. Si sobre dos cuerpos en reposo relativo a un observador inercial actúa la misma fuerza (sin intercambio de materia), entonces se tiene que
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
A partir de esto podemos comparar las masas de los cuerpos a través del cociente de las magnitudes de las aceleraciones
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Por lo tanto, si m_2 fuera «un kilogramo patrón», entonces nos basta con observar el cociente \|\vec{a}_2\|/\|\vec{a}_1\| para saber cuántos kilogramos tiene m_1.
Tercera ley (de Acción y Reacción):
Si un cuerpo A ejerce una fuerza «acción» sobre otro B, entonces B ejerce una fuerza «reacción» sobre A de igual magnitud pero dirección contraria.
La tercera ley de Newton no solo permite hablar con mayor precisión sobre las fuerzas, sino que además establece de forma explicita que los agentes externos que aplican una fuerza también son objetos físicos susceptibles de ellas:
- El agente externo es un objeto físico susceptible de ser afectado por las fuerzas.
- Las fuerzas nunca se dan de forma aislada, si no que se producen de a pares llamados «pares de acción-reacción», y a suma vectorial de esos pares siempre es nula.
- Los pares de acción-reacción ocurren siempre en cuerpos diferentes, de modo que la fuerza total sobre un cuerpo no es necesariamente nula.
Dado que los pares acción-reacción se ejecutan siempre sobre una linea recta, esto trae consigo lo que veremos más adelante que es la conservación del momento angular.
A parte de estas cosas, la tercera ley de Newton dice algunas otras de forma implicita:
- Para que se pueda aplicar una fuerza neta no-nula sobre un cuerpo, es necesario por lo menos un segundo objeto.
- La acción y la reacción se dan de forma simultánea. Dado que dos cuerpos pueden interactuar a distancia (a través de la gravitación o el electromagnetismo), se tiene que necesariamente en la mecánica de Newton debe existir una forma de transmitir la información de un punto a otro con una velocidad infinita. Sabemos que tal cosa es imposible, porque según la relatividad especial la velocidad máxima es la de la luz en el vacío, de modo que decimos que ésta tercera ley es una aproximación de la realidad.
¿Cómo usar las leyes de Newton?
Para entender cómo se utilizan las leyes de Newton de modo tal que su significado sea claro, lo mejor es recurrir a ejemplos basados en situaciones concretas y la construcción de diagramas de cuerpo libre.
Diagramas de Cuerpo Libre
Un diagrama de cuerpo libre es un esquema pictórico en donde representamos las fuerzas que actúan sobre un cuerpo. En función de lo que hemos revisado sobre el peso podemos construir los siguientes ejemplos de diagramas de cuerpo libre.
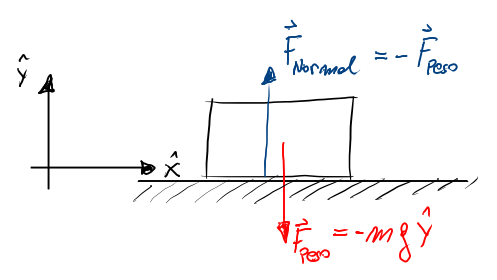
Un cuerpo apoyado sobre un plano horizontal
Debido a la gravedad, todos los cuerpos con masa sienten una fuerza dirigida al suelo. A través de la segunda Ley de Newton observamos que tal fuerza está dada por el producto de la masa y la aceleración de gravedad \vec{g}=-g\hat{y}, donde g=9,81[m/s^2].
\vec{F}_{peso}=m\vec{g} = -mg\hat{y}
Lo que entendemos como «el peso» de un cuerpo es en realidad la magnitud de esta fuerza de peso que acabamos de ver.
{peso}=\|\vec{F}_{peso}\|= mg
Cuando dejamos un bloque sobre un plano horizontal aparece un par de fuerzas acción-reacción: estas son la fuerza peso y la normal. Tales fuerzas son iguales en magnitud pero opuestas en dirección de modo tal que la suma vectorial de las fuerzas sobre el cuerpo es cero y, por lo tanto, su estado de movimiento permanece constante en el tiempo.
Deslizamiento sobre un plano horizontal
Imaginemos que ahora el bloque es atado a una cuerda y tiramos de él como se muestra en el siguiente diagrama de cuerpo libre:
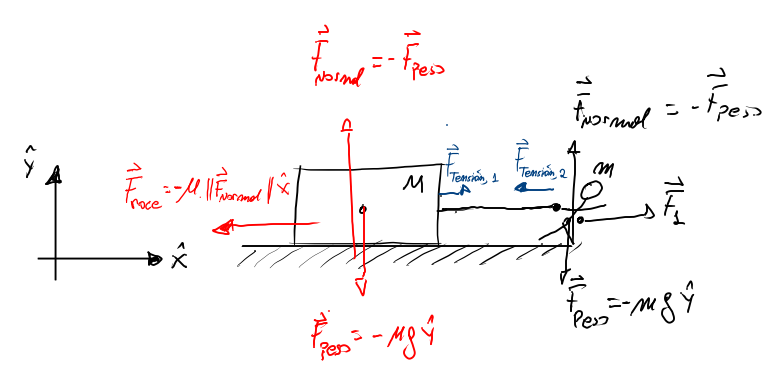
Aquí observamos la aparición de dos pares acción-reacción: por un lado tenemos los pares asociados a las fuerzas peso y normales de los cuerpos, hay un tercer par acción-reacción asociados a los extremos de la cuerda con que el sujeto tira del bloque, y por último, un par asociado a la fuerza impresa \vec{F}_1 y la fuerza de roce,\vec{F}_{roce}, con un valor máximo de \mu\|\vec{F}_\textnormal{normal}\|.
Coeficiente de roce y las fuerzas de rozamiento
Aquí \mu es el coeficiente de roce que expresa la oposición al deslizamiento entre dos superficies; el coeficiente de roce tiene dos versiones: una cinética (\mu_c) y otra estática (\mu_e). El roce estático aparece cuando el cuerpo permanece en reposo mientras que el cinético aparece una vez que el cuerpo ha comenzado a deslizarse.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Cuerpo en reposo} \\ \\ \mu_c & ;& \textnormal{Cuerpo en movimiento} \end{array}\right. & ; & \textnormal{Donde } \mu_c \leq \mu_e\end{array}
La fuerza de roce se opone al movimiento del cuerpo que la padece y se puede modelar (de forma simplificada) a través de la siguiente expresión
\vec{F}_\textnormal{roce} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{normal}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{normal}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{normal}\| \lt \|\vec{F}\| \end{array} \right.
Cuando la fuerza impresa es inferior o igual al roce estático máximo, el cuerpo permanece en reposo relativo respecto al suelo. Si la fuerza impresa es superior al roce estático, entonces el cuerpo se pone en movimiento y el roce se vuelve cinético, la fuerza neta sobre el cuerpo es por lo tanto: \vec{F}_{neta} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{normal}\|\hat{x}, y por lo tanto, se mueve con una aceleración \vec{a} = \vec{F}_{neta}/M. Si una vez puesto el cuerpo en movimiento, la fuerza impresa se iguala con el roce cinético, entonces el cuerpo se mueve con velocidad constante.
Deslizamiento sobre un plano inclinado
Cuando un objeto se desliza por un plano inclinado en un ángulo \alpha se tiene el siguiente diagrama de fuerzas:
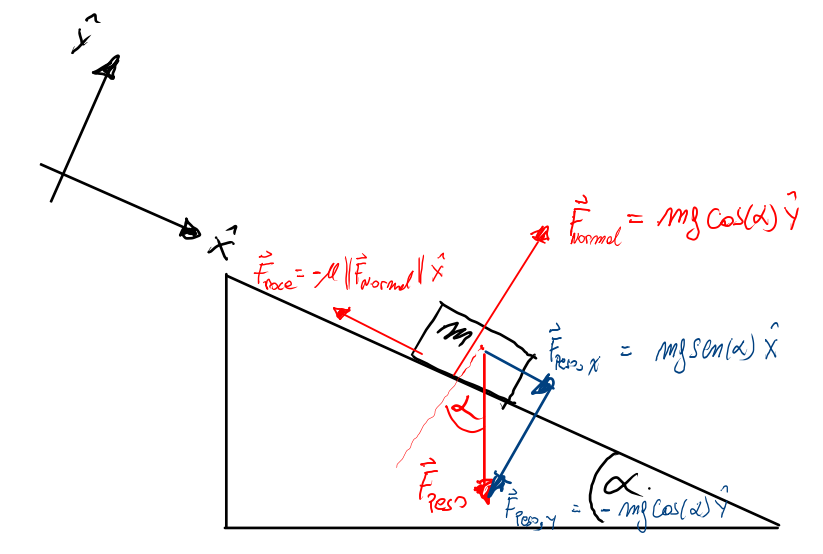
Aquí y por conveniencia, se ha elegido un sistema de referencia orientado de modo tal que la coordenada horizontal esté alineada con el plano de deslizamiento. En este esquema, la fuerza peso se divide en dos componentes: una paralela y otra perpendicular al movimiento.
- Componente paralela: \vec{F}_{\textnormal{peso},x}=mg\sin(\alpha)\hat{x}
- Componente perpendicular: \vec{F}_{peso,y}=-mg\cos(\alpha)\hat{y}
La fuerza roce aparece como reacción a la componente paralela al movimiento de la fuerza peso, y la fuerza normal como reacción a la componente perpendicular de la fuerza peso. Si la componente horizontal de la fuerza peso supera al roce estático máximo, entonces cambiará el estado de movimiento del bloque con una aceleración
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Masa colgante
Una masa que cuelga de una cuerda unida a un techo y que permanece en reposo tiene el siguiente diagrama de cuerpo libre:
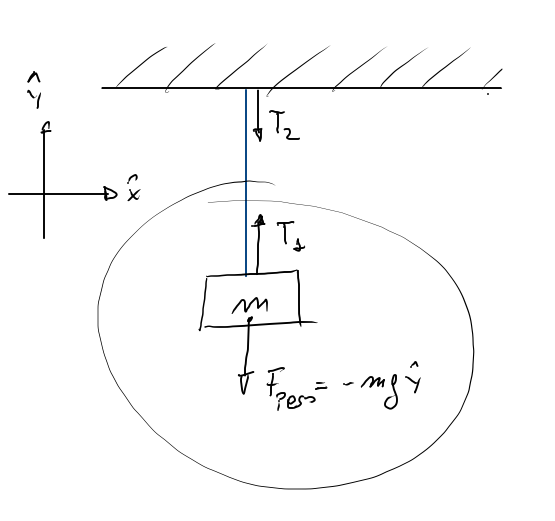
Una masa que cuelga de una cuerda unida a un techo y que permanece en reposo tiene el siguiente diagrama de cuerpo libre:
Sobre la cuerda hay un par de fuerzas que llamamos «tensiones», si la cuerda resulta inextensible, estas fuerzas son iguales y opuestas. Sobre el bloque también actúa un par de fueras: el peso y la tensión de la cuerda. Si el bloque se mantiene colgando y reposo, entonces el peso y la tensión son opuestos y de igual magnitud. Hay una cuarta fuerza que no es mostrada aquí, la que mantiene unida la cuerda al techo; el conjunto de estas cuatro fuerzas configuran dos pares acción-reacción.
Movimiento del péndulo simple
Una masa unida a una cuerda inextensible, y esta unida a un techo, que oscila en torno a una posición de equilibrio debido a su propio peso es lo que llamamos péndulo simple. Abajo tenemos su diagrama de cuerpo libre.
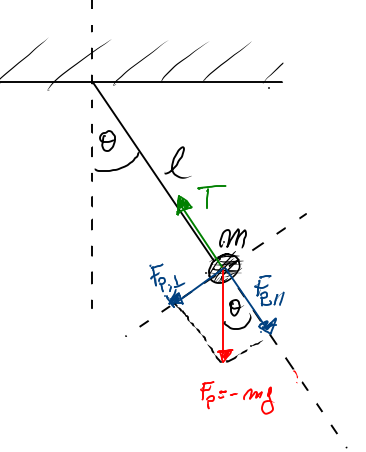
Dado que la cuerda es inextensible, tenemos que la aceleración radial es cero y, en consecuencia:
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
Por otro lado, para la componente perpendicular a la cuerda se tendrá
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
A partir de esta última expresión es posible inferir una ecuación diferencial que nos permitirá modelar la posición angular \theta del péndulo simple en el tiempo
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
Pero la obtención de ésta ecuación y las inferencias que a partir de ella podemos hacer es algo que veremos en detalles más adelante.
Resolución de problemas usando las leyes de Newton
Utilice las leyes de Newton para resolver los siguientes problemas:
- Un bloque de 15[kg] es puesto sobre una superficie horizontal. Entre el bloque y la superficie hay un roce estático \mu_e=0,55 y un roce cinético \mu_c=0,31
- ¿Cuál será la fuerza mínima necesaria para que el bloque se ponga en movimiento?
- Calcule la aceleración del bloque cuando este se pone en movimiento debido a la fuerza obtenida en el inciso anterior.
- Un bloque de 12[kg] es puesto sobre un plano inclinable. Si el coeficiente de roce estático es \mu_e=0,03, determine el ángulo de inclinación máximo para el cual el bloque permanecerá en reposo.
- Un bloque de 75[kg] sube con velocidad constante por un plano inclinado 30^o respecto a la horizontal debido a una fuerza que se aplica horizontalmente sobre él. Si entre el bloque y la superficie del plano hay un coeficiente de roce cinético \mu_c=0,21, determine la magnitud de esa fuerza aplicada.
- Considere dos masas m_1 y m_2 unidos por una cuerda inextensible y sin masa que pasa por una polea tal y como se muestra en la figura. Calcule la aceleración de ambas masas.

- Una cuerda flexible de masa M cuelga entre dos paredes formando un ángulo \alpha en los puntos de unión. Calcule la tensión de la cuerda sobre el punto más bajo.
- Un cuerpo de masa m da vueltas en círculos sobre el plano x,y con un radio R y una velocidad angular \omega constante. Calcule la fuerza aplicada sobre la masa.

