
Newton’s Laws
Summary:
This class addresses Newton’s laws and their role in the dynamics of bodies. It explores how mass and velocity determine linear momentum and describes the three laws: inertia, which maintains the state of motion in the absence of external forces, the relationship between force and acceleration, and the action and reaction between bodies. Through examples such as sliding on planes and the motion of pendulums, the application of these laws is illustrated, culminating in practical exercises to consolidate learning.
Learning Objectives:
By the end of this class, the student will be able to:
- Understand the three laws of Newton and their application in the dynamics of bodies.
- Apply Newton’s laws to analyze and solve dynamic problems.
- Identify the relationship between mass, velocity, and linear momentum.
- Analyze the importance of inertial observers in the study of dynamics.
- Explain how Newton’s second law relates force and acceleration.
- Describe the concept of inertial mass and how to compare it between different bodies.
TABLE OF CONTENTS
Introduction
Newton’s Laws on the Dynamics of Bodies
How to Use Newton’s Laws?
Problem Solving Using Newton’s Laws
Introduction
If the kinematics we have reviewed in the previous classes allow us to describe the motion of bodies, through Newton’s laws we obtain the dynamics that allow us to reason about the causes of motion (or changes in the state of motion). Here, the ideas of position and time are important because in terms of these we define velocity and acceleration, but an additional one is added: mass.
Mass is important to define the state of motion of bodies, or linear momentum. It is said that the linear momentum of a body, \vec{p}, is the product of mass and velocity
\Large \vec{p}=m\vec{v}
The state of motion is the key idea behind Newton’s laws.
Newton’s Laws on the Dynamics of Bodies
First Law (Inertia):
In the absence of external agents, all bodies maintain a constant state of motion.
The first of Newton’s laws has the brilliance of establishing two issues of profound importance for physics. The first and most evident: it establishes linear momentum as a conserved quantity; and the second and equally important, but much more implicit, allows us to establish what an inertial observer is.
There are many ways to define an observer, but among them, there is a special class that we call an inertial observer. The difference lies in that, from the perspective of an inertial observer, in the absence of an external agent, the state of motion of bodies is a conservative quantity.
What distinguishes an inertial observer from a non-inertial one?
The difference lies in that, from the perspective of an inertial observer, in the absence of an external agent, the state of motion of bodies is a conservative quantity.
Second Law (Force and Mass):
From the perspective of an inertial observer, the force exerted by an external agent on a body is equivalent to the variation of its state of motion.
In other words, if a force is applied to a body \vec{F}, then it will have that.
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
The well-known relationship “force equals mass times acceleration,” \vec{F}=m\vec{a}, is just a consequence of Newton’s second law, which is obtained from the properties of derivatives and the conservation of mass.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
In this last step, it has been considered that dm/dt=0 because it is assumed that no mass is being added or removed, and d\vec{v}/dt is the definition of acceleration.
Inertial Mass
The second of Newton’s laws also allows us to specify the concept of mass. Here it appears as a proportionality constant between force and acceleration. The greater the mass, the greater the force required to achieve the same acceleration; as a result, mass is understood as a measure of the inertia of bodies and hence the name inertial mass. If two bodies at rest relative to an inertial observer are acted upon by the same force (without exchanging matter), then we have that
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
CONTENT INDEX
Introduction
Newton’s Laws on the Dynamics of Bodies
How to Use Newton’s Laws?
Problem Solving Using Newton’s Laws
Introduction
If the kinematics we reviewed in the previous classes allow us to describe the motion of bodies, Newton’s laws give us the dynamics that allow us to reason about the causes of motion (or changes in the state of motion). Here, the ideas of position and time are important because, in terms of these, we define velocity and acceleration, but an additional one is added: mass.
Mass is important to define the state of motion of bodies or linear momentum. It is said that the linear momentum of a body, \vec{p}, is the product of mass times velocity
\Large \vec{p}=m\vec{v}
The state of motion is the key idea behind Newton’s laws.
Newton’s Laws on the Dynamics of Bodies
First Law (Inertia):
In the absence of external agents, all bodies maintain a constant state of motion.
The first of Newton’s laws has the genius to establish two issues of profound importance for physics. The first and most obvious: it establishes linear momentum as a conserved quantity; and the second, equally important but much more implicit, allows us to establish what an inertial observer is.
There are many ways to define an observer, but among them, there is a special class that we call an inertial observer. The difference lies in that, from the perspective of an inertial observer, in the absence of an external agent, the state of motion of bodies is a conservative quantity.
What distinguishes an inertial observer from one that is not?
The difference lies in that, from the perspective of an inertial observer, in the absence of an external agent, the state of motion of bodies is a conservative quantity.
Second Law (Force and Mass):
From the perspective of an inertial observer, the force exerted by an external agent on a body is equivalent to the variation of its state of motion.
In other words, if a force is applied to a body \vec{F} then it will be that
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
The well-known relationship “force equals mass times acceleration,” \vec{F}=m\vec{a}, is just a consequence of Newton’s Second Law, obtained from the properties of derivatives and mass conservation.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
In this last step, it has been considered that dm/dt=0 because it is assumed that no mass is being added or removed, and d\vec{v}/dt is the definition of acceleration.
Inertial Mass
Newton’s second law also allows us to clarify the concept of mass. Here it appears as a constant of proportionality between force and acceleration. The greater the mass, the greater the force must be to achieve the same acceleration; as a result, mass is understood as a measure of the inertia of bodies, hence the name inertial mass. If the same force (without exchange of matter) acts on two bodies at rest relative to an inertial observer, then it is that
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
From this, we can compare the masses of the bodies through the quotient of the magnitudes of the accelerations
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Therefore, if m_2 were a “standard kilogram,” then it is enough to observe the quotient \|\vec{a}_2\|/\|\vec{a}_1\| to know how many kilograms m_1 has.
Third Law (Action and Reaction):
If body A exerts a “action” force on another body B, then B exerts a “reaction” force on A of equal magnitude but opposite direction.
Newton’s third law not only allows us to speak with greater precision about forces but also explicitly states that external agents applying a force are also physical objects susceptible to them:
- The external agent is a physical object that can be affected by forces.
- Forces never occur in isolation but rather in pairs called “action-reaction pairs,” and the vector sum of these pairs is always zero.
- Action-reaction pairs always occur on different bodies, so the total force on a body is not necessarily zero.
Since action-reaction pairs always act on a straight line, this brings what we will see later as the conservation of angular momentum.
Apart from these things, Newton’s third law implies a few other things:
- For a non-zero net force to be applied to a body, at least a second object is necessary.
- Action and reaction occur simultaneously. Since two bodies can interact at a distance (through gravitation or electromagnetism), it follows that in Newtonian mechanics, there must be a way to transmit information from one point to another with infinite speed. We know that such a thing is impossible because, according to special relativity, the maximum speed is the speed of light in a vacuum, so we say that this third law is an approximation of reality.
How to Use Newton’s Laws?
To understand how to use Newton’s laws so that their meaning is clear, it is best to resort to examples based on concrete situations and the construction of free-body diagrams.
Free-Body Diagrams
A free-body diagram is a pictorial scheme where we represent the forces acting on a body. Based on what we have reviewed about weight, we can construct the following examples of free-body diagrams.
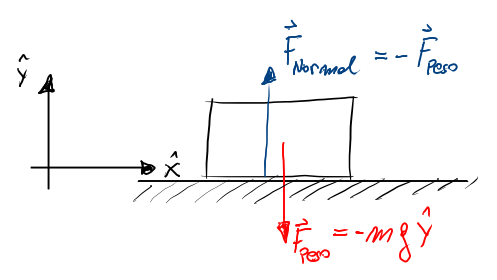
A body resting on a horizontal plane
Due to gravity, all bodies with mass feel a force directed to the ground. Through Newton’s second law, we observe that such force is given by the product of the mass and gravitational acceleration \vec{g}=-g\hat{y}, where g=9.81[m/s^2].
\vec{F}_{weight}=m\vec{g} = -mg\hat{y}
What we understand as “weight” of a body is actually the magnitude of this weight force that we have just seen.
{weight}=\|\vec{F}_{weight}\|= mg
When we place a block on a horizontal plane, a pair of action-reaction forces appears: these are the weight and the normal force. Such forces are equal in magnitude but opposite in direction so that the vector sum of the forces on the body is zero, and therefore, its state of motion remains constant over time.
Sliding on a Horizontal Plane
Let’s imagine that the block is now tied to a rope and we pull it as shown in the following free-body diagram:
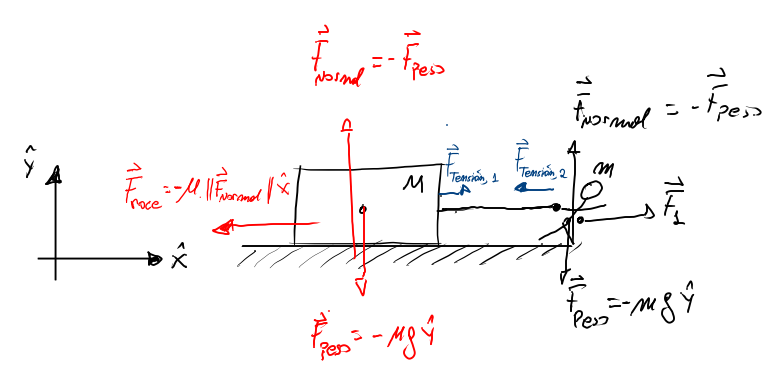
Here we observe the appearance of two action-reaction pairs: on the one hand, we have the pairs associated with the weight and normal forces of the bodies, there is a third action-reaction pair associated with the ends of the rope with which the subject pulls the block, and finally, a pair associated with the applied force \vec{F}_1 and the friction force, \vec{F}_{friction}, with a maximum value of \mu\|\vec{F}_\textnormal{normal}\|.
Coefficient of Friction and Friction Forces
Here \mu is the coefficient of friction that expresses the resistance to sliding between two surfaces; the coefficient of friction has two versions: a kinetic one (\mu_c) and a static one (\mu_e). Static friction appears when the body remains at rest, while kinetic friction appears once the body has begun to slide.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Body at rest} \\ \\ \mu_c & ;& \textnormal{Body in motion} \end{array}\right. & ; & \textnormal{Where } \mu_c \leq \mu_e\end{array}
The friction force opposes the motion of the body experiencing it and can be modeled (simplified) through the following expression
\vec{F}_\textnormal{friction} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{normal}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{normal}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{normal}\| \lt \|\vec{F}\| \end{array} \right.
When the applied force is less than or equal to the maximum static friction, the body remains at rest relative to the ground. If the applied force exceeds static friction, the body begins to move and friction becomes kinetic; the net force on the body is therefore: \vec{F}_{net} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{normal}\|\hat{x}, and therefore, it moves with an acceleration \vec{a} = \vec{F}_{net}/M. If once the body is in motion, the applied force equals kinetic friction, then the body moves with a constant velocity.
Sliding on an Inclined Plane
When an object slides on an inclined plane at an angle \alpha the following force diagram is obtained:
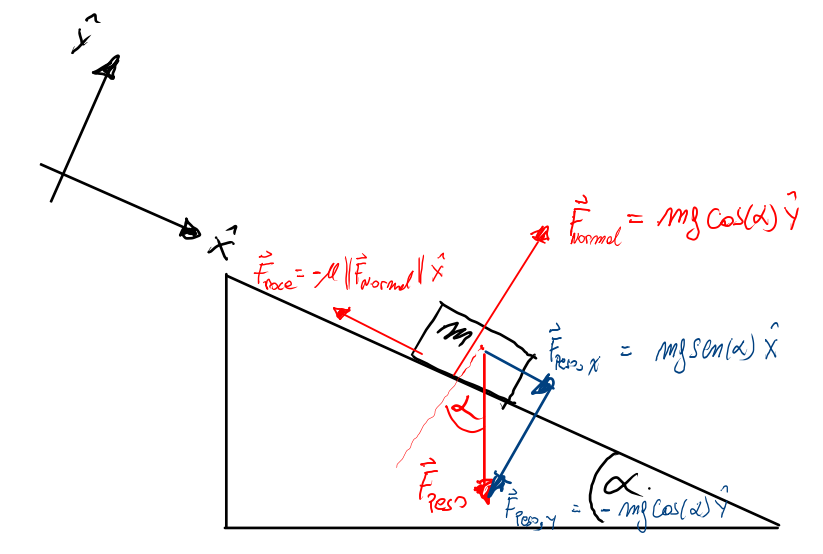
Here, for convenience, a reference system has been chosen oriented so that the horizontal coordinate is aligned with the sliding plane. In this scheme, the weight force is divided into two components: one parallel and the other perpendicular to the motion.
- Parallel Component: \vec{F}_{\textnormal{weight},x}=mg\sin(\alpha)\hat{x}
- Perpendicular Component: \vec{F}_{weight,y}=-mg\cos(\alpha)\hat{y}
The friction force appears as a reaction to the parallel component of the weight force, and the normal force as a reaction to the perpendicular component of the weight force. If the horizontal component of the weight force exceeds the maximum static friction, the state of motion of the block will change with an acceleration
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Hanging Mass
A mass hanging from a rope attached to a ceiling and that remains at rest has the following free-body diagram:
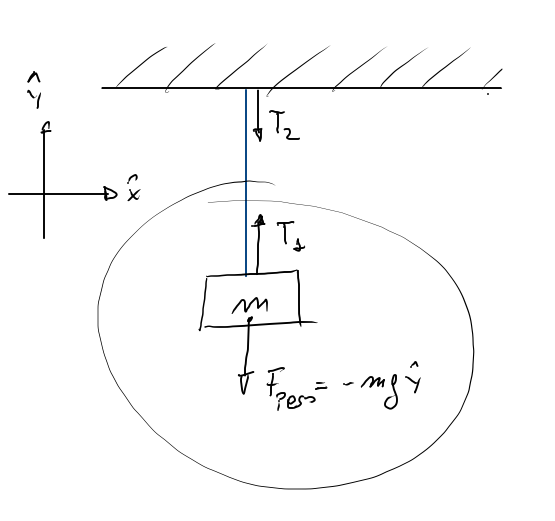
A mass hanging from a rope attached to a ceiling and that remains at rest has the following free-body diagram:
On the rope, there is a pair of forces called “tensions,” if the rope is inextensible, these forces are equal and opposite. On the block, there is also a pair of forces: weight and rope tension. If the block remains hanging and at rest, then the weight and tension are opposite and of equal magnitude. There is a fourth force not shown here, the one that holds the rope to the ceiling; these four forces form two action-reaction pairs.
Simple Pendulum Motion
A mass attached to an inextensible rope, attached to a ceiling, that oscillates around an equilibrium position due to its own weight is what we call a simple pendulum. Below is its free-body diagram.
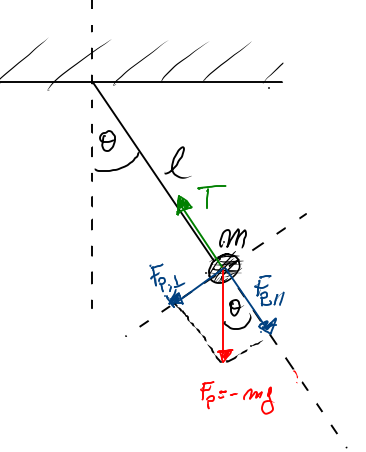
Since the rope is inextensible, the radial acceleration is zero and, consequently:
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
On the other hand, for the component perpendicular to the rope, it will be
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
From this last expression, it is possible to infer a differential equation that will allow us to model the angular position \theta of the simple pendulum over time
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
But the derivation of this equation and the inferences we can make from it are something we will see in detail later.
Problem Solving Using Newton’s Laws
Use Newton’s laws to solve the following problems:
- A block of 15[kg] is placed on a horizontal surface. Between the block and the surface, there is static friction \mu_e=0.55 and kinetic friction \mu_c=0.31
- What will be the minimum force necessary to put the block in motion?
- Calculate the acceleration of the block when it starts moving due to the force obtained in the previous point.
- A block of 12[kg] is placed on an inclinable plane. If the static friction coefficient is \mu_e=0.03, determine the maximum inclination angle for which the block will remain at rest.
- A block of 75[kg] ascends with a constant velocity on an inclined plane at 30^o with respect to the horizontal due to a force applied horizontally to it. If there is a kinetic friction coefficient \mu_c=0.21, between the block and the surface of the plane, determine the magnitude of the applied force.
- Consider two masses m_1 and m_2 connected by an inextensible, massless rope that passes over a pulley as shown in the figure. Calculate the acceleration of both masses.

- A flexible rope of mass M hangs between two walls forming an angle \alpha at the attachment points. Calculate the tension of the rope at the lowest point.
- A body of mass m moves in circles on the x,y plane with a radius R and a constant angular velocity \omega. Calculate the force applied to the mass.

