
Fundamenta Cinematicae: Positio, Velocitas et Acceleratio
Summarium:
In hac lectione perpendemus notiones fundamentales cinematicae: positionem, velocitatem et accelerationem. Examinabimus quomodo positio secundum tempus repraesentetur, distinguentes inter velocitatem et accelerationem instantaneas atque medias. Praeterea deducemus aequationes motus cum acceleratione constanti, quae necessariae sunt ad praedicendam positionem et velocitatem obiecti.
PROPOSITA DISCENDI:
In fine huius lectionis, discipuli poterunt:
- Meminisse definitiones fundamentales positionis, velocitatis et accelerationis in cinematica.
- Analyzare relationes inter accelerationem, velocitatem et positionem.
- Appicere derivationes et integrationes ad computandam velocitatem et positionem ex acceleratione, et e converso.
- Intellegere differentiam inter velocitatem instantaneam et mediam, atque inter accelerationem instantaneam et mediam.
INDEX CONTENTORUM
Introductio
Positio, Spatium et Observatores
Velocitas et Celeritas
Acceleratio
Aequationes Itinerarii
Conclusio
Introductio
Ex acceleratione fieri potest velocitatem et positionem computare per integrationem respectu temporis, et ex positione possumus computare velocitatem et accelerationem per differentiationem respectu temporis. Hae voces summatim indicant quae de cinematica investigabimus, et unus ex praecipuis propositis nostris erit intellegere significationem horum terminorum. Motus formam mutationis repraesentat, et omnia in natura mutationibus obnoxia sunt. Quapropter studium mutationis et eius variationum est unus ex columnis fundamentalibus physicae.
Multae sunt variabiles mutationi obnoxiae: novum in vetus convertitur, aliquis potest mutare ex una professione in aliam, ex sano in aegrotum et e converso, et ex die in noctem, inter alia. Haec omnia sunt exempla mutationum, sed in studio cinematicae intendemus in uno peculiariter: mutatione positionis sive motu. In studio motus, duo aspectus complementarii perspici possunt: unus fundatus in causis quae eum efficiunt et alter in modo quo explicatur, unde oriuntur Dynamica et Cinematica, quae simul Mechanicam constituunt.
In physica spatium physicorum ut spatium vectoriale fingimus, ut repraesentationem mathematicam notionum sicut positio, velocitas et acceleratio faciliorem reddamus. Communiter spatium tridimensionale \mathbb{R}^3 ad hunc finem adhibemus, quamquam in theoria spatia cuiuslibet dimensionis apta esse possunt secundum contextum.
Positio, Spatium et Observatores
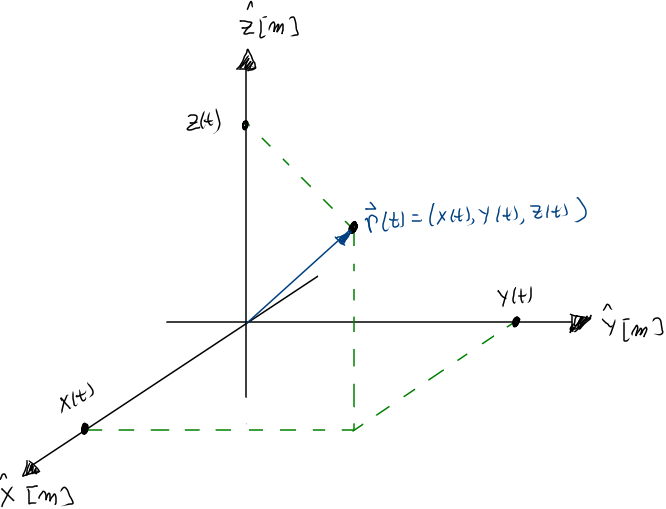
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Haec est functio quae positionem \vec{r}(t) cuique t\in\mathbb{R} attribuit, atque ideo dicimus eam esse functionem positionis (vel simpliciter positionem). Variabilis independens t appellatur “tempus,” et parameter n respondet “dimensiones” spatii. Symbola [T] et [L] ad dimensiones physicas temporis et longitudinis pertinent, plerumque in “secondis” et “metris” mensuratas.
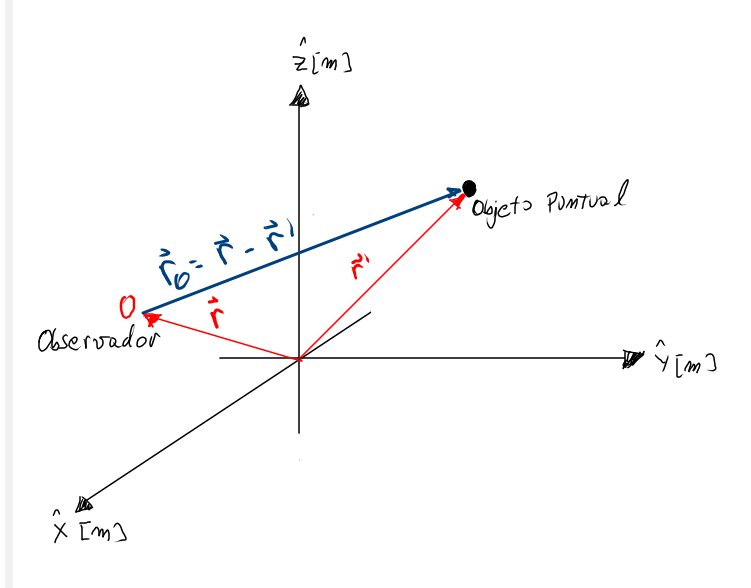
Positio, sicut quaelibet magnitudo physica, ab observatore mensuratur. In descriptione quam de positione dedi, implicite assumpsi observatorem habere coordinatas vectoris nulli, \vec{0}. Si observator \mathcal{O} habet coordinatas vectoris \vec{r} et obiectum punctiforme habet coordinatas \vec{r}^\prime, tunc positio ad observatorem relata erit:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
Spatium est collectio omnium positionum possibilium, idem etiam est collectio omnium positionum possibilium ad quemlibet observatorem relatarum. Positio est functio temporis et adhibetur ad repraesentandum mathematice locum ubi obiectum ideale, quod “obiectum punctiforme” appellatur, in unoquoque momento t invenitur. Obiectum punctiforme est idealizatio: id est quod ex obiecto reali manet cum omnibus qualitatibus, etiam magnitudine et figura, spoliatur, solo “loco quem in spatio occupat” retento.
Positio plerumque est vector. Vectorum duo elementa sunt: magnitudo et directio. Magnitudo positionis ad observatorem relata est distantia ab observatore et datur per dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
Ex hoc loco, maxime commendatur ut teneantur argumenta cursus calculi differentialis et integralis.
Celeritas et Velocitas
Si positio est differentiabilis respectu temporis, tunc fieri potest definire velocitatem relatam ad observatorem \mathcal{O}, \vec{v}_\mathcal{O}(t), hoc modo:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
Simpliciter dictum: velocitas est derivata temporalis positionis et indicat quomodo positio mutetur in unoquoque momento t.
Duae species velocitatum exsistunt: instantanea et media. Velocitas instantanea est nuper proposita, velocitas media obtinetur omittendo calculum limitis. Velocitas media super intervallo temporis longitudinis \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, sic definita est:
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
ubi \overline{t} est quilibet momentum contentum in intervallo [t,t+\Delta t].
Ex velocitate (sive instantanea sive media) definitur celeritas ut eius magnitudo respondens. Celeritas relata ad observatorem \mathcal{O} est v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, et celeritas media \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
Celeritas et velocitas metiuntur in unitatibus longitudinis supra unitates temporis, [L/T], plerumque in “metris per secundum”.
Acceleratio
Similiter ac velocitas, si est differentiabilis respectu temporis, tunc fieri potest definire notionem accelerationis relatam ad observatorem \mathcal{O}, \vec{a}_\mathcal{O}(t), hoc modo:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
Acceleratio est derivata temporalis velocitatis et consequenter indicat quomodo velocitas tempore mutetur.
Similiter ac celeritas, exsistit acceleratio instantanea et acceleratio media. Acceleratio instantanea est quam modo consideravimus, acceleratio media obtinetur omittendo calculum limitis. Acceleratio media super intervallo temporis longitudinis \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, sic definita est:
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
Acceleratio metitur in unitatibus longitudinis supra tempus in quadratum, [L/T^2], plerumque in “metris per secundum in quadratum”.
Aequationes Motus
Supponamus nos habere obiectum punctiforme quod movetur respectu observatoris \mathcal{O} cum acceleratione constanti \vec{a}_\mathcal{O}(t) = \vec{a}_0. Si fieri potest derivare velocitatem et accelerationem ex positione, tunc ex acceleratione fieri potest velocitatem et positionem integrare. Resultata hoc modo obtenta cognoscuntur ut aequationes motus.
Integrando \vec{a}_\mathcal{O}(t) = \vec{a}_0 habemus:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
Et iterum integrando obtinemus
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Hic, constantes \vec{v}_0 et \vec{r}_0 sunt constantes integrationis quae repraesentant velocitatem et positionem initiales obiecti punctiformis respectu observatoris \mathcal{O}. Summatim, aequationes motus sunt:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
Per has aequationes fieri potest motum cuiuslibet obiecti punctiformis quod movetur cum acceleratione constanti plene describere. Hoc constituit quod ex acceleratione fieri potest velocitatem et positionem integrare, et ex positione fieri potest velocitatem et accelerationem derivare.
Notandum est has esse aequationes vectoriales, atque ideo in suas componentes dividi possunt. Si motum in spatio tridimensionali modellamus, tunc singulas componentes sic habebimus:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Ita, constituuntur novem aequationes, una pro singulis axibus coordinatis. Exempli gratia, pro axe \hat{x}, habebimus
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
Communiter, coordinata \hat{z} ad altitudinem reservatur, unde assumitur a_{0z}=-g \approx -9.81[m/s^2]; id est, acceleratio in hoc axe coniungitur cum acceleratione gravitatis terrestris. Hoc in aequationes includitur ad phaenomena sicut casus liber vel proiectilis iactus modellanda.
Conclusio
In hoc itinere per fundamenta cinematicae, exploravimus quomodo mathematica adhibeatur ad describendum et intellegendum motum in spatio physico. A repraesentatione positionis ut vectoris in spatio dimensionis arbitrariae usque ad derivationem et integrationem functionum vectorialium ad obtinendam velocitatem, accelerationem et aequationes motus, vidimus quomodo hae notiones inter se nectantur atque applicentur in analysi motus.
Cinematica, dum motum sine consideratione causarum quae eum efficiunt investigat, nobis praebet prospectum purum et mathematice elegantem de motu obiectorum punctiformium. Instrumentis calculi differentialis et integralis, possumus perscrutari schemata motus et praedicere trajectorias futuras, quod est essentiale in multis regionibus physicae et ingenieriae.
Denique, inclusio accelerationis gravitati debitae in nostras aequationes nos ad applicationes concretiores perducet, sicut casum liberum et proiectilium iactum, ostendens momentum atque utilitatem cinematicae in vita nostra cotidiana. Quapropter studium cinematicae non est solum exercitium theoreticum, sed instrumentum fundamentale ad intellegendum et tractandum mundum physicum qui nos circumdat.