
Fundamentos de la Cinemática: Posición, Velocidad y Aceleración
Resumen:
En esta clase revisaremos los conceptos fundamentales de la cinemática: posición, velocidad y aceleración. Exploraremos cómo representar la posición en función del tiempo, diferenciando entre velocidad y aceleración instantáneas y medias. Además, deduciremos las ecuaciones del movimiento con aceleración constante, esenciales para predecir la posición y velocidad de un objeto.
OBJETIVOS DE APRENDIZAJE:
Al final de esta clase, los estudiantes serán capaces de:
- Recordar las definiciones básicas de posición, velocidad y aceleración en cinemática.
- Analizar las relaciones entre aceleración, velocidad y posición.
- Aplicar derivadas e integrales para calcular la velocidad y la posición a partir de la aceleración, y viceversa.
- Comprender la diferencia entre velocidad instantánea y media, y entre aceleración instantánea y media.
ÍNDICE DE CONTENIDOS
Introducción
Posición, Espacio y Observadores
Velocidad y Rapidez
Aceleración
Ecuaciones de Itinerario
Conclusión
Introducción
A partir de la aceleración, es posible calcular la velocidad y la posición mediante la integración respecto al tiempo, y a partir de la posición, podemos calcular la velocidad y la aceleración mediante la diferenciación respecto al tiempo. Estas palabras resumen lo que exploraremos sobre cinemática, y uno de nuestros principales objetivos será entender el significado de estos términos. El movimiento representa una forma de cambio, y todo en la naturaleza está sujeto a cambios. Por lo tanto, el estudio del cambio y sus variaciones es uno de los pilares fundamentales de la física.
Hay muchas variables susceptibles de cambio: lo nuevo se convierte en viejo, uno puede cambiar de una profesión a otra, de saludable a enfermo y viceversa, y de día a noche, entre otras. Todos estos son ejemplos de cambios, pero al estudiar cinemática, nos enfocaremos en uno en particular: el cambio de posición o movimiento. En el estudio del movimiento, podemos apreciar dos enfoques complementarios: uno basado en las causas que lo producen y otro en la forma en que se desarrolla, dando lugar a la Dinámica y la Cinemática, que juntas forman la Mecánica.
En física, modelamos el espacio físico como un espacio vectorial para facilitar la representación matemática de conceptos como posición, velocidad y aceleración. Comúnmente, usamos el espacio tridimensional \mathbb{R}^3 para este propósito, aunque en teoría, los espacios de cualquier dimensión pueden ser adecuados según el contexto.
Posición, Espacio y Observadores
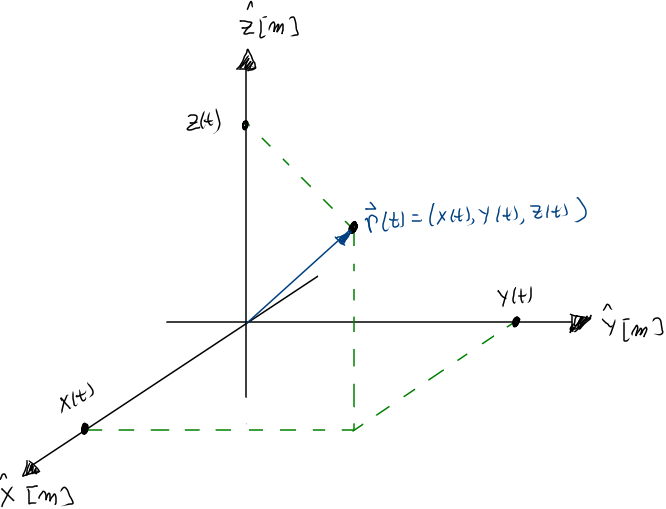
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Esta es una función que asigna una posición \vec{r}(t) a cada t\in\mathbb{R}, y por lo tanto, decimos que es una función de posición (o simplemente posición). La variable independiente t se llama «tiempo,» y el parámetro n corresponde a la «dimensión» del espacio. Los símbolos [T] y [L] se refieren a las dimensiones físicas de tiempo y longitud, generalmente medidas en «segundos» y «metros,» respectivamente.
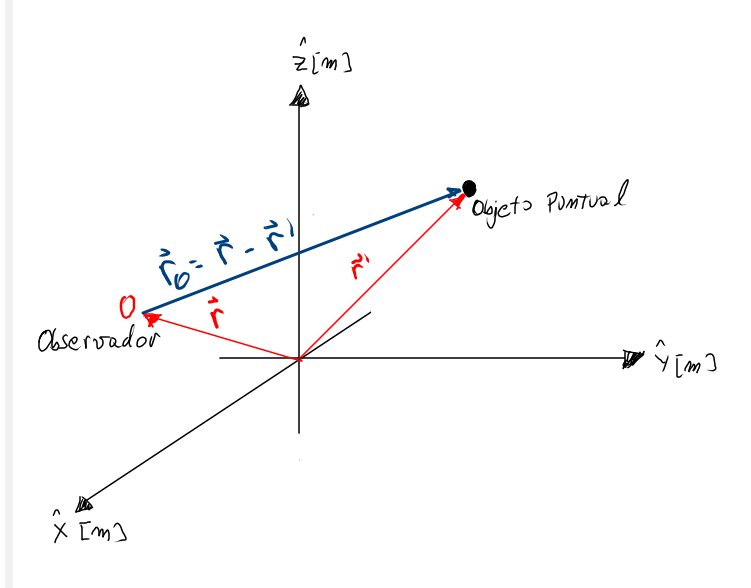
La posición, como cualquier magnitud física, es medida por un observador. En la descripción que he dado de la posición, he asumido implícitamente que el observador tiene las coordenadas del vector nulo, \vec{0}. Si el observador \mathcal{O} tiene las coordenadas del vector \vec{r} y el objeto puntual tiene coordenadas \vec{r}^\prime, entonces la posición relativa al observador será:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
El espacio es el conjunto de todas las posiciones posibles, también es el conjunto de todas las posiciones posibles relativas a cualquier observador. La posición es una función del tiempo y se usa para representar matemáticamente el lugar donde se encuentra un objeto ideal llamado «objeto puntual» en cada instante t. El objeto puntual es una idealización, es lo que queda de un objeto real cuando lo despojamos de todas sus cualidades, incluido tamaño y forma, manteniendo solo el «lugar que ocupa en el espacio.»
La posición generalmente es un vector. Los vectores se componen de dos elementos: magnitud y dirección. La magnitud de la posición relativa a un observador es la distancia al observador y se da por dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
Desde este punto, es muy recomendable dominar los contenidos del curso de cálculo diferencial e integral.
Rapidez y Velocidad
Si la posición es diferenciable respecto al tiempo, entonces es posible definir la velocidad relativa a un observador \mathcal{O}, \vec{v}_\mathcal{O}(t), de la siguiente manera:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
En términos sencillos: la velocidad es la derivada temporal de la posición y nos dice cómo cambia la posición en cada instante t.
Existen dos tipos de velocidades: la instantánea y la media. La velocidad instantánea es la recién presentada, la velocidad media se obtiene omitiendo el cálculo del límite. La velocidad media sobre el intervalo de tiempo de longitud \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, se define como
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
donde \overline{t} es cualquier instante contenido en el intervalo [t,t+\Delta t].
A partir de la velocidad (ya sea instantánea o media) se define la rapidez como su magnitud correspondiente. La rapidez relativa a un observador \mathcal{O} es v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, y la rapidez media \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
La rapidez y la velocidad se miden en unidades de longitud sobre unidades de tiempo, [L/T], generalmente en «metros por segundo».
Aceleración
De manera similar a la velocidad, si es diferenciable respecto al tiempo, entonces es posible definir el concepto de aceleración relativa a un observador \mathcal{O}, \vec{a}_\mathcal{O}(t), de la siguiente forma:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
La aceleración es la derivada temporal de la velocidad y consecuentemente nos dice cómo cambia la velocidad a lo largo del tiempo.
De forma similar a la rapidez, existe la aceleración instantánea y la aceleración media. La aceleración instantánea es la que acabamos de revisar, la aceleración media se obtiene omitiendo el cálculo del límite. La aceleración media sobre el intervalo de tiempo de longitud \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, se define como
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
La aceleración se mide en unidades de longitud sobre tiempo al cuadrado, [L/T^2], generalmente en «metros por segundo al cuadrado».
Ecuaciones de Movimiento
Supongamos que tenemos un objeto puntual que se mueve en relación a un observador \mathcal{O} con una aceleración constante \vec{a}_\mathcal{O}(t) = \vec{a}_0. Si es posible derivar velocidad y aceleración a partir de la posición, entonces a partir de la aceleración, es posible calcular la velocidad y la posición integrando. Los resultados obtenidos de esta manera se conocen como ecuaciones de movimiento.
Integrando \vec{a}_\mathcal{O}(t) = \vec{a}_0 tenemos:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
E integrando nuevamente obtenemos
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Aquí, las constantes \vec{v}_0 y \vec{r}_0 son constantes de integración que representan la velocidad y posición iniciales del objeto puntual relativo al observador \mathcal{O}. En resumen, las ecuaciones de movimiento son:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
Mediante estas ecuaciones, es posible describir completamente el movimiento de cualquier objeto puntual que se mueva con aceleración constante. Esto establece que a partir de la aceleración, es posible calcular la velocidad y la posición integrando, y a partir de la posición, es posible calcular la velocidad y la aceleración derivando.
Nótese que estas son ecuaciones vectoriales, y por lo tanto, pueden ser separadas en sus componentes. Si estamos modelando un movimiento en un espacio tridimensional, entonces tendremos cada componente separada de la siguiente manera:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Así, se crean un conjunto de 9 ecuaciones, una para cada eje coordenado. Por ejemplo, para el eje \hat{x}, tendremos
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
Generalmente, la coordenada \hat{z} se reserva para la altura, por lo que se asume que a_{0z}=-g \approx -9.81[m/s^2]; es decir, la aceleración en este eje se asocia con la aceleración producida por la gravedad terrestre. Esto se incluye en las ecuaciones para modelar fenómenos como la caída libre o el lanzamiento de un proyectil.
Conclusión
En este recorrido por los fundamentos de la cinemática, hemos explorado cómo se utiliza la matemática para describir y entender el movimiento en el espacio físico. Desde la representación de la posición como un vector en un espacio de dimensión arbitraria hasta la derivación e integración de funciones vectoriales para obtener velocidad, aceleración y las ecuaciones de movimiento, hemos visto cómo estos conceptos se entrelazan y aplican en el análisis del movimiento.
La cinemática, al estudiar el movimiento sin considerar las causas que lo producen, nos ofrece una perspectiva pura y matemáticamente elegante del movimiento de los objetos puntuales. Con las herramientas del cálculo diferencial e integral, podemos desentrañar patrones de movimiento y predecir trayectorias futuras, lo cual es esencial en muchas áreas de la física y la ingeniería.
Finalmente, la inclusión de la aceleración debida a la gravedad en nuestras ecuaciones nos llevará a aplicaciones más concretas, como la caída libre y el lanzamiento de proyectiles, demostrando la relevancia y aplicabilidad de la cinemática en nuestro mundo cotidiano. Por lo tanto, el estudio de la cinemática no es solo un ejercicio teórico, sino una herramienta fundamental para comprender y manipular el mundo físico que nos rodea.