
Les Lois de Newton
Résumé :
Ce cours aborde les lois de Newton et leur rôle dans la dynamique des corps. Il explore comment la masse et la vitesse déterminent le moment linéaire, et décrit les trois lois : l’inertie qui maintient l’état de mouvement en l’absence de forces extérieures, la relation entre la force et l’accélération, et l’action et la réaction entre les corps. À travers des exemples tels que le glissement sur des plans et le mouvement des pendules, il illustre l’application de ces lois, en se terminant par des exercices pratiques pour consolider l’apprentissage.
Objectifs d’apprentissage :
À la fin de ce cours, l’étudiant sera capable de :
- Comprendre les trois lois de Newton et leur application dans la dynamique des corps.
- Appliquer les lois de Newton pour analyser et résoudre des problèmes de dynamique.
- Identifier la relation entre la masse, la vitesse et le moment linéaire.
- Analyser l’importance des observateurs inertiels dans l’étude de la dynamique.
- Expliquer comment la deuxième loi de Newton relie la force et l’accélération.
- Décrire le concept de masse inertielle et comment la comparer entre différents corps.
Table des matières
Introduction
Les lois de Newton sur la dynamique des corps
Comment utiliser les lois de Newton ?
Résolution de problèmes avec les lois de Newton
Introduction
Si la cinématique que nous avons revue dans les cours précédents nous permet de décrire le mouvement des corps, les lois de Newton nous fournissent la dynamique qui nous permet de raisonner sur les causes du mouvement (ou des changements d’état du mouvement). Ici, les notions de position et de temps sont importantes, car en termes de celles-ci, nous définissons la vitesse et l’accélération, mais à celles-ci s’ajoute un autre facteur : la masse.
La masse est importante pour définir l’état de mouvement des corps, ou le moment linéaire. On dit que le moment linéaire d’un corps, \vec{p}, est le produit de la masse par la vitesse.
\Large \vec{p}=m\vec{v}
L’état de mouvement est l’idée clé derrière les lois de Newton.
Les lois de Newton sur la dynamique des corps
Première loi (de l’inertie) :
En l’absence d’agents externes, tous les corps maintiennent leur état de mouvement constant.
La première loi de Newton a le génie d’établir deux questions d’une importance profonde pour la physique. La première et la plus évidente : elle établit le moment linéaire comme une grandeur conservée ; et la deuxième, également importante mais bien plus implicite, nous permet de définir ce qu’est un observateur inertiel.
Il existe de nombreuses façons de définir un observateur, mais parmi tous, il existe une classe spéciale que nous appelons observateur inertiel. La différence réside dans le fait que, du point de vue d’un observateur inertiel, en l’absence d’un agent externe, l’état de mouvement des corps est une grandeur conservatrice.
Qu’est-ce qui distingue un observateur inertiel d’un autre qui ne l’est pas ?
La différence réside dans le fait que, du point de vue d’un observateur inertiel, en l’absence d’un agent externe, l’état de mouvement des corps est une grandeur conservatrice.
Deuxième loi (de la force et de la masse) :
Du point de vue d’un observateur inertiel, la force appliquée par un agent externe sur un corps est équivalente à la variation de son état de mouvement.
En d’autres termes, si une force est appliquée à un corps \vec{F}, alors nous aurons :
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
La relation bien connue « force égale masse multipliée par accélération », \vec{F}=m\vec{a}, n’est rien d’autre qu’une conséquence de la deuxième loi de Newton, qui est obtenue à partir des propriétés des dérivées et de la conservation de la masse.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
Dans cette dernière étape, on a considéré que dm/dt=0 car on suppose qu’aucune masse n’est ajoutée ni retirée, et d\vec{v}/dt est la définition de l’accélération.
Masse inertielle
La deuxième loi de Newton permet également de préciser le concept de masse. Ici, elle apparaît comme une constante de proportionnalité entre la force et l’accélération. Plus la masse est grande, plus la force appliquée doit être grande pour obtenir la même accélération ; en conséquence, la masse est comprise comme une mesure de l’inertie des corps, d’où le nom de masse inertielle. Si deux corps en repos relatif à un observateur inertiel subissent la même force (sans échange de matière), alors nous avons :
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
À partir de cela, nous pouvons comparer les masses des corps à travers le quotient des magnitudes des accélérations :
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Par conséquent, si m_2 est « un kilogramme étalon », alors il suffit d’observer le quotient \|\vec{a}_2\|/\|\vec{a}_1\| pour savoir combien de kilogrammes a m_1.
Troisième loi (de l’action et de la réaction) :
Si un corps A exerce une force « action » sur un autre corps B, alors B exerce une force « réaction » sur A de même grandeur mais de direction opposée.
La troisième loi de Newton ne permet pas seulement de parler des forces de manière plus précise, mais elle établit également explicitement que les agents externes qui appliquent une force sont également des objets physiques susceptibles de les subir :
- L’agent externe est un objet physique susceptible d’être affecté par les forces.
- Les forces ne se produisent jamais isolément, elles se produisent par paires appelées « paires action-réaction », et la somme vectorielle de ces paires est toujours nulle.
- Les paires action-réaction se produisent toujours sur des corps différents, de sorte que la force totale sur un corps n’est pas nécessairement nulle.
Étant donné que les paires action-réaction s’exécutent toujours sur une ligne droite, cela entraîne ce que nous verrons plus tard, à savoir la conservation du moment angulaire.
En dehors de ces choses, la troisième loi de Newton implique certaines autres choses de manière implicite :
- Pour qu’une force nette non nulle puisse être appliquée sur un corps, un deuxième objet est nécessaire au minimum.
- L’action et la réaction se produisent simultanément. Étant donné que deux corps peuvent interagir à distance (à travers la gravitation ou l’électromagnétisme), il est nécessaire que, dans la mécanique de Newton, il existe un moyen de transmettre l’information d’un point à un autre avec une vitesse infinie. Nous savons que cela est impossible, car selon la relativité spéciale, la vitesse maximale est celle de la lumière dans le vide, de sorte que nous disons que cette troisième loi est une approximation de la réalité.
Comment utiliser les lois de Newton ?
Pour comprendre comment les lois de Newton sont utilisées de manière à ce que leur signification soit claire, le mieux est de recourir à des exemples basés sur des situations concrètes et à la construction de diagrammes de corps libre.
Diagrammes de Corps Libre
Un diagramme de corps libre est une représentation schématique où nous représentons les forces agissant sur un corps. En fonction de ce que nous avons vu sur le poids, nous pouvons construire les exemples suivants de diagrammes de corps libre.
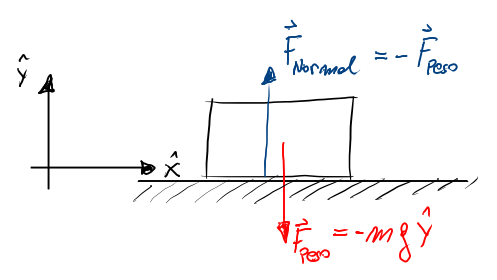
Un corps reposant sur un plan horizontal
En raison de la gravité, tous les corps ayant une masse ressentent une force dirigée vers le sol. Grâce à la deuxième loi de Newton, nous observons que cette force est donnée par le produit de la masse et de l’accélération due à la gravité \vec{g}=-g\hat{y}, où g=9,81[m/s^2].
\vec{F}_{poids}=m\vec{g} = -mg\hat{y}
Ce que nous comprenons comme « le poids » d’un corps est en réalité la grandeur de cette force de poids que nous venons de voir.
{poids}=\|\vec{F}_{poids}\|= mg
Lorsque nous posons un bloc sur un plan horizontal, un couple de forces action-réaction apparaît : ce sont la force de poids et la force normale. Ces forces sont égales en magnitude mais opposées en direction de sorte que la somme vectorielle des forces sur le corps est nulle et, par conséquent, son état de mouvement reste constant dans le temps.
Glissement sur un plan horizontal
Imaginons maintenant que le bloc est attaché à une corde et que nous le tirons comme illustré dans le diagramme de corps libre suivant :
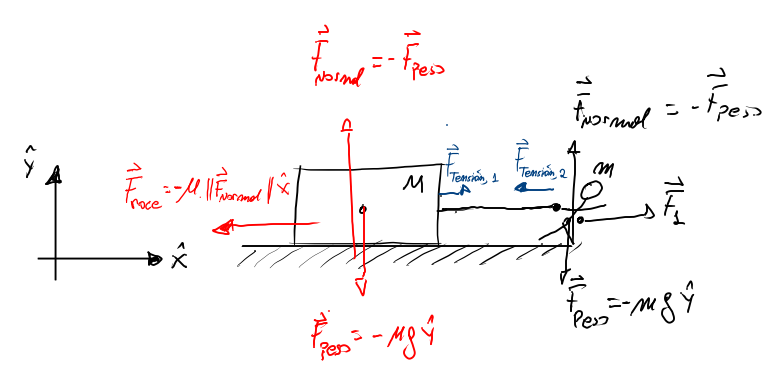
Ici, nous observons l’apparition de deux paires action-réaction : d’une part, nous avons les paires associées aux forces de poids et normales des corps, il y a une troisième paire action-réaction associée aux extrémités de la corde avec laquelle le sujet tire sur le bloc, et enfin, une paire associée à la force appliquée \vec{F}_1 et à la force de frottement, \vec{F}_{frottement}, avec une valeur maximale de \mu\|\vec{F}_\textnormal{normale}\|.
Coefficient de frottement et forces de frottement
Ici \mu est le coefficient de frottement qui exprime l’opposition au glissement entre deux surfaces ; le coefficient de frottement a deux versions : une cinétique (\mu_c) et une statique (\mu_e). Le frottement statique apparaît lorsque le corps reste au repos tandis que le cinétique apparaît une fois que le corps a commencé à glisser.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Corps au repos} \\ \\ \mu_c & ;& \textnormal{Corps en mouvement} \end{array}\right. & ; & \textnormal{Où } \mu_c \leq \mu_e\end{array}
La force de frottement s’oppose au mouvement du corps qui en est affecté et peut être modélisée (de manière simplifiée) à travers l’expression suivante :
\vec{F}_\textnormal{frottement} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{normale}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{normale}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{normale}\| \lt \|\vec{F}\| \end{array} \right.
Lorsque la force appliquée est inférieure ou égale au frottement statique maximal, le corps reste au repos relatif par rapport au sol. Si la force appliquée est supérieure au frottement statique, alors le corps se met en mouvement et le frottement devient cinétique, la force nette sur le corps est donc : \vec{F}_{nette} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{normale}\|\hat{x}, et par conséquent, il se déplace avec une accélération \vec{a} = \vec{F}_{nette}/M. Si une fois le corps mis en mouvement, la force appliquée devient égale au frottement cinétique, alors le corps se déplace à vitesse constante.
Glissement sur un plan incliné
Lorsqu’un objet glisse sur un plan incliné à un angle \alpha, on obtient le diagramme des forces suivant :
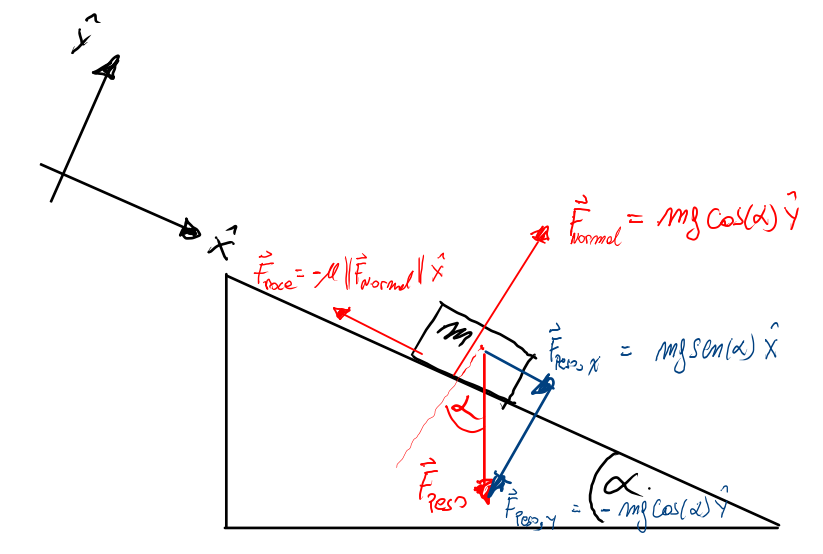
Ici, pour plus de commodité, un système de référence a été choisi de manière à ce que la coordonnée horizontale soit alignée avec le plan de glissement. Dans ce schéma, la force de poids est divisée en deux composants : un parallèle et un perpendiculaire au mouvement.
- Composante parallèle : \vec{F}_{\textnormal{poids},x}=mg\sin(\alpha)\hat{x}
- Composante perpendiculaire : \vec{F}_{poids,y}=-mg\cos(\alpha)\hat{y}
La force de frottement apparaît en réaction à la composante parallèle au mouvement de la force de poids, et la force normale en réaction à la composante perpendiculaire de la force de poids. Si la composante horizontale de la force de poids dépasse le frottement statique maximal, alors l’état de mouvement du bloc changera avec une accélération :
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Masse suspendue
Une masse suspendue à une corde attachée à un plafond et qui reste en repos a le diagramme de corps libre suivant :
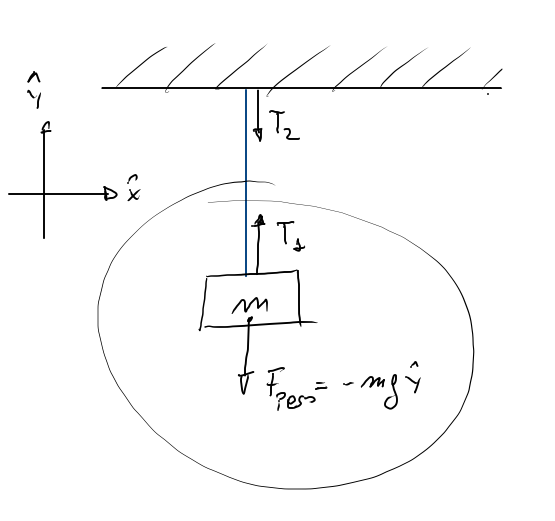
Une masse suspendue à une corde attachée à un plafond et qui reste en repos a le diagramme de corps libre suivant :
Sur la corde, il y a une paire de forces que nous appelons « tensions », si la corde est inextensible, ces forces sont égales et opposées. Sur le bloc agit également une paire de forces : le poids et la tension de la corde. Si le bloc reste suspendu et au repos, alors le poids et la tension sont opposés et de même magnitude. Il y a une quatrième force qui n’est pas montrée ici, celle qui maintient la corde attachée au plafond ; l’ensemble de ces quatre forces forme deux paires action-réaction.
Mouvement du pendule simple
Une masse attachée à une corde inextensible, et celle-ci attachée à un plafond, qui oscille autour d’une position d’équilibre en raison de son propre poids est ce que nous appelons un pendule simple. Ci-dessous, nous avons son diagramme de corps libre.
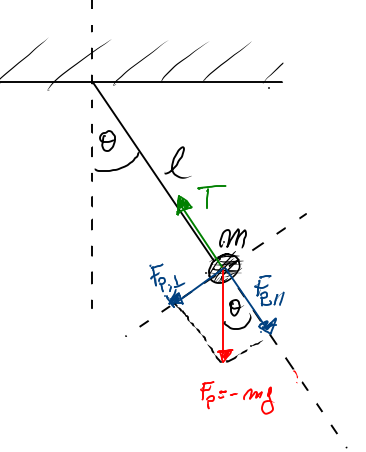
Étant donné que la corde est inextensible, nous avons que l’accélération radiale est nulle et, par conséquent :
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
D’autre part, pour la composante perpendiculaire à la corde, nous aurons :
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
À partir de cette dernière expression, il est possible d’inférer une équation différentielle qui nous permettra de modéliser la position angulaire \theta du pendule simple dans le temps :
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
Mais l’obtention de cette équation et les inférences que nous pouvons en faire seront examinées plus en détail plus tard.
Résolution de problèmes avec les lois de Newton
Utilisez les lois de Newton pour résoudre les problèmes suivants :
- Un bloc de 15[kg] est placé sur une surface horizontale. Entre le bloc et la surface, il y a un frottement statique \mu_e=0,55 et un frottement cinétique \mu_c=0,31.
- Quelle sera la force minimale nécessaire pour que le bloc commence à bouger ?
- Calculez l’accélération du bloc lorsqu’il commence à bouger en raison de la force obtenue à l’étape précédente.
- Un bloc de 12[kg] est placé sur un plan inclinable. Si le coefficient de frottement statique est \mu_e=0,03, déterminez l’angle d’inclinaison maximal pour lequel le bloc restera au repos.
- Un bloc de 75[kg] monte à une vitesse constante sur un plan incliné de 30^o par rapport à l’horizontale en raison d’une force appliquée horizontalement sur lui. Si entre le bloc et la surface du plan il y a un coefficient de frottement cinétique \mu_c=0,21, déterminez la magnitude de cette force appliquée.
- Considérez deux masses m_1 et m_2 reliées par une corde inextensible et sans masse qui passe par une poulie comme illustré sur l’image. Calculez l’accélération des deux masses.

- Une corde flexible de masse M est suspendue entre deux murs formant un angle \alpha aux points de jonction. Calculez la tension de la corde au point le plus bas.
- Un corps de masse m tourne en cercle sur le plan x,y avec un rayon R et une vitesse angulaire constante \omega. Calculez la force appliquée sur la masse.

