
Hyperbolische Rotationen der Raumzeit
Zusammenfassung:
In dieser Vorlesung werden wir untersuchen, wie die Lorentz-Transformationen als Transformationen von Raumzeitrotationen neu interpretiert werden können. Wir beginnen mit der Betrachtung von Rotationen im vierdimensionalen Minkowski-Raum, wobei wir zwischen rein räumlichen Rotationen und solchen unterscheiden, die raumzeitliche Achsen einbeziehen.
LERNZIELE:
Am Ende dieser Vorlesung wird der Studierende in der Lage sein:
- Zu verstehen die Rotationstransformationen in der Minkowski-Raumzeit.
- Zu verstehen die Lorentz-Transformationen als raumzeitliche Rotationen.
INHALT
Einleitung
Rotationen in der Minkowski-Raumzeit
Reine räumliche Rotationen
Matrixverallgemeinerung für dreidimensionale Rotationen
Räumliche Rotationen für Ereignisse mit Raumzeitkoordinaten
Hyperbolische Rotationen der Raumzeit
Einführung des Geschwindigkeitsparameters
Formulierung der raumzeitlichen Rotationen als hyperbolische Rotationen
Schlussfolgerungen
Einleitung
Bis zu diesem Punkt haben wir im Detail untersucht, wie die Lorentz-Transformationen durchgeführt werden, das heißt, wie sich die Koordinaten in der Minkowski-Raumzeit eines bestimmten Ereignisses verändern, wenn sie aus verschiedenen Inertialsystemen betrachtet werden. Im Folgenden werden wir eine andere Perspektive auf diese Entwicklungen einnehmen, indem wir sie als Transformationen von Raumzeitrotationen betrachten. Bald werden wir feststellen, dass dieser Ansatz auf algebraischer Ebene Vorteile bietet, die die Berechnungen im Allgemeinen vereinfachen, insbesondere beim Kombinieren mehrerer aufeinanderfolgender Lorentz-Transformationen.
Rotationen in der Minkowski-Raumzeit
Beginnen wir mit der Analyse, wie die verschiedenen räumlichen Rotationen in der Minkowski-Raumzeit durchgeführt werden. Da es sich hierbei um einen vierdimensionalen Raum handelt, ist es am praktischsten, eine Rotation in Bezug auf eine bestimmte Ebene zu definieren. Auf diese Weise können wir Rotationen in den Ebenen xy, xz und yz sowie auch in den Ebenen xt, yt und zt festlegen. Rotationen, die in Ebenen durchgeführt werden, die von Raumachsen gebildet werden, sind rein räumliche Rotationen, während diejenigen, die in Ebenen aus Raum- und Zeitachsen erfolgen, raumzeitliche Rotationen sind. Vorerst konzentrieren wir uns darauf, die rein räumlichen Rotationen im Detail zu verstehen, um dieses Wissen später auf raumzeitliche Rotationen auszudehnen.
Reine räumliche Rotationen
Beginnen wir unser Studium der räumlichen Rotationen, indem wir untersuchen, wie die Rotationen in der Ebene xy durchgeführt werden. Nehmen wir dazu an, dass wir einen Punkt mit den Koordinaten (a,b) in Bezug auf das durch die Achsen \hat{x} und \hat{y} definierte System haben. Analysieren wir dann die Beziehung, die diese Koordinaten mit denen verbindet, die ein rotiertes Bezugssystem beobachten würde. Dieses System ist durch die Achsen \hat{x}^\prime und \hat{y}^\prime definiert, die um einen Winkel \theta gegenüber dem ursprünglichen System gedreht sind, wie in der folgenden Abbildung gezeigt:

Um die Beziehungen zwischen den Koordinaten (a,b) und (a^\prime,b^\prime), die von jedem System gemessen werden, zu erhalten, können wir die folgenden Leitlinien verwenden:
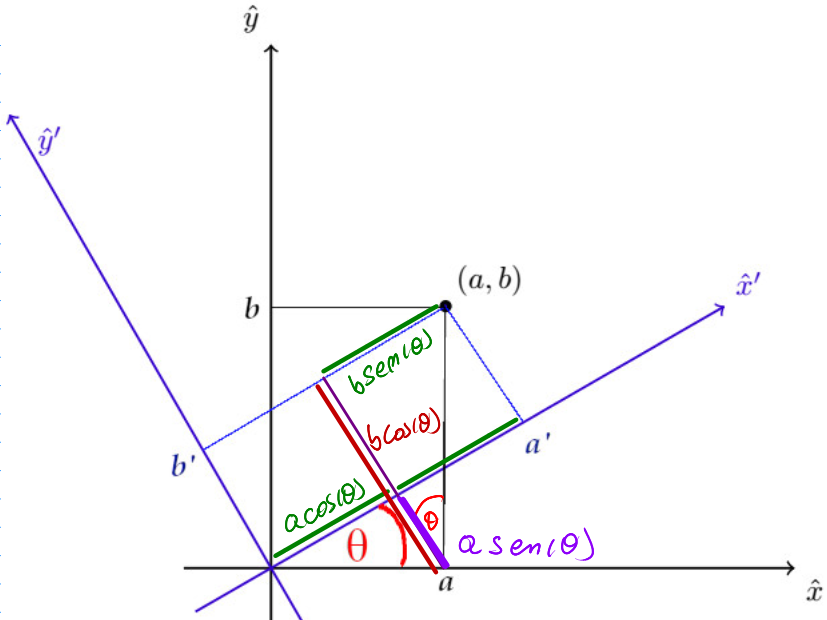
So ist es nun einfach, die Transformationsgleichungen zu erhalten
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
Matrixverallgemeinerung für dreidimensionale Rotationen
Dieses Gleichungssystem kann zweckmäßiger in seiner Matrixform dargestellt werden.
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
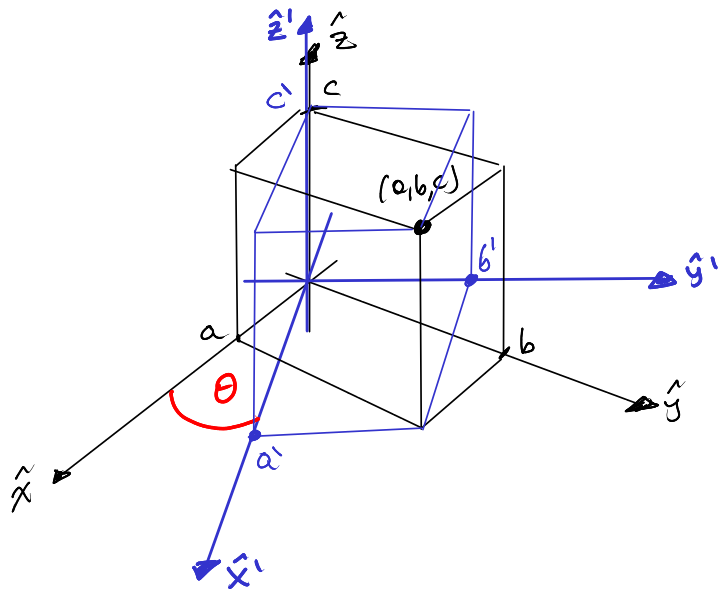
Dies ist praktisch, da es von hier aus leicht ist, auf höhere Dimensionen zu verallgemeinern. Zum Beispiel würde ein Punkt mit den Koordinaten (a,b,c) im durch die Achsen \hat{x}, \hat{y} und \hat{z} gebildeten System, betrachtet aus einem anderen System mit den Achsen \hat{x}^\prime, \hat{y}^\prime und \hat{z}^\prime, das sich vom ursprünglichen System durch eine Rotation um einen Winkel \theta in Bezug auf die Ebene \hat{x}\hat{y} unterscheidet, folgendermaßen aussehen:
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
Daraus erhalten wir die verschiedenen Transformationsmatrizen der Rotationen für jede der Raumebenen.
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{Rotation um einen Winkel }\theta\\ \text{in der Ebene }xy \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotation um einen Winkel }\theta\\ \text{in der Ebene }yz \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotation um einen Winkel }\theta\\ \text{in der Ebene }xz \end{array} \end{array}
Um die inverse Transformation dieser Rotationen zu berechnen, genügt es, \theta durch -\theta zu ersetzen.
Räumliche Rotationen für Ereignisse mit Raumzeitkoordinaten
Ähnlich wie wir von zwei auf drei Dimensionen verallgemeinert haben, können wir dies auf vier Dimensionen ausdehnen. Um die Kohärenz mit der Sprache der speziellen Relativitätstheorie zu wahren, ist es wichtig, die Bedeutung jeder Koordinate zu verstehen. Im Allgemeinen werden die Raumzeitkoordinaten wie folgt ausgedrückt:
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
Hier bedeuten die Hochindizes keine Potenzen, sondern kennzeichnen die Eigenschaften jeder Koordinate. Die Koordinate mit Hochindex 0 stellt die zeitliche Dimension dar, während die Koordinaten mit den Hochindizes 1, 2 und 3 den räumlichen Dimensionen entsprechen. Mit diesem Verständnis werden die rein räumlichen Rotationen in der Minkowski-Raumzeit durch die folgenden Beziehungen beschrieben:
Rotation in Bezug auf die Ebene xy: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotation in Bezug auf die Ebene yz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotation in Bezug auf die Ebene xz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Diese Transformationen behalten exakt die gleichen Eigenschaften wie ihre dreidimensionalen Gegenstücke.
Hyperbolische Rotationen der Raumzeit
Einführung des Geschwindigkeitsparameters
Die Ähnlichkeit zwischen den Lorentz-Transformationen und einer räumlichen Rotation kann durch die Einführung dessen gewonnen werden, was wir den Geschwindigkeitsparameter nennen
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
Da \beta_{ss^\prime_x}\in]-1,1[, gilt \psi_{ss^\prime_x}\in\mathbb{R}. Außerdem beachten wir, dass sich daraus ergibt, dass \gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x}) und \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}). Dies ergibt sich aus den folgenden Berechnungen:
Es ist klar, dass \psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}) gleichbedeutend damit ist zu sagen \beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x}); und daher:
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
Da sowohl der Gammafaktor als auch der hyperbolische Kosinus immer größer oder gleich 1 sind, ist schließlich gezeigt, dass \gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x}).
In ähnlicher Weise erhält man durch Fortführung der zuvor durchgeführten Berechnungen:
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
Und daher \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}).
Formulierung der Raumzeitrotationen als hyperbolische Rotationen
Nachdem wir diesen Punkt erreicht haben, können wir nun den mit dem Geschwindigkeitsboost verbundenen Faktor und den Gammafaktor unter Verwendung des Geschwindigkeitsparameters in den Lorentz-Transformationen umschreiben. Betrachten wir zwei Inertialsysteme S und S^\prime in Standardkonfiguration, wobei auf das zweite ein Boost entlang der Achse x, \beta_{ss^\prime_x}, angewendet wird, so gilt:
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
Dieses Gleichungssystem lässt sich in folgender Matrixdarstellung schreiben:
Hyperbolische Raumzeitrotation in der tx-Ebene:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
In ähnlicher Weise haben wir hyperbolische Rotationen in jeder der Raumzeitebenen:
Hyperbolische Raumzeitrotation in der ty-Ebene:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Hyperbolische Raumzeitrotation in der tz-Ebene:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Aufgrund ihrer Form und algebraischen Eigenschaften sind diese Transformationen den räumlichen Rotationen sehr ähnlich, nur dass anstelle von trigonometrischen Funktionen hyperbolische Funktionen verwendet werden. Obwohl es sich nicht um Rotationen im strengen Sinne handelt, behalten sie eine gewisse Analogie zu den eingangs betrachteten Rotationen. Zum Beispiel erhält man, ähnlich wie bei den Rotationen, die inverse Transformation, indem man den entsprechenden Geschwindigkeitsparameter \psi durch -\psi ersetzt. Diese Transformationen werden manchmal als hyperbolische Rotationen bezeichnet, und der Geschwindigkeitsparameter ist auch als hyperbolischer Winkel bekannt.
Schlussfolgerungen
Bisher haben wir das Konzept der Rotationen in der Minkowski-Raumzeit umfassend behandelt, was uns ein tieferes Verständnis der Lorentz-Transformationen ermöglicht. Durch diese Untersuchung haben wir die folgenden Schlüsselpunkte erreicht:
- Neudeutung der Lorentz-Transformationen: Wir haben gelernt, die Lorentz-Transformationen nicht nur als Änderungen der Koordinaten aufgrund verschiedener Bezugssysteme zu sehen und zu verstehen, sondern auch als Rotationen in der Raumzeit.
- Verständnis der Rotationen in der Minkowski-Raumzeit: Wir haben die Rotationen im vierdimensionalen Minkowski-Raum im Detail untersucht.
- Erforschung der hyperbolischen Raumzeitrotationen: Schließlich haben wir das Konzept der hyperbolischen Raumzeitrotationen eingeführt und ihre Ähnlichkeit mit den üblichen räumlichen Rotationen untersucht.