
Leges Newtoni
Summarium:
Haec lectio tractat de legibus Newtoni earumque munere in dynamica corporum. Explicatur quomodo massa et velocitas momentum lineare determinent, et describuntur tres leges: inertia quae statum motus servat absente viribus externis, relatio inter vim et accelerationem, atque actio et reactio inter corpora. Per exempla sicut lapsus in planis et motus pendulorum illustratur applicatio harum legum, quae in exercitationibus practicis ad corroborandum discendi processum culminat.
Proposita Discendi:
Confecta hac lectione discipulus poterit:
- Intellegere tres leges Newtoni earumque applicationem in dynamica corporum.
- Applicare leges Newtoni ad analysin et solutionem problematum dynamicorum.
- Agnoscere relationem inter massam, velocitatem et momentum lineare.
- Analyzare momentum observatorum inertialium in studio dynamicae.
- Explicare quomodo secunda lex Newtoni vim et accelerationem connectat.
- Describere notionem massae inertialis et modum comparandi inter corpora diversa.
INDEX CONTENTORUM
Introductio
Leges Newtoni de Dynamica corporum
Quomodo uti legibus Newtoni?
Solutio problematum legibus Newtoni utens
Introductio
Si cinematica quam in praeteritis lectionibus recensuimus nobis permittit motum corporum describere, per leges Newtoni obtinemus dynamicam quae nobis concedit de causis motus (vel mutationum status motus) rationem reddere. Hic notiones positionis et temporis magni momenti sunt, quia per haec definimus velocitatem et accelerationem, sed his adiungitur aliud: massa.
Massa est magni momenti ad definiendum statum motus corporum, sive momentum lineare. Dicitur momentum lineare corporis, \vec{p}, esse productum massae per velocitatem.
\Large \vec{p}=m\vec{v}
Status motus est idea praecipua quae subiacet legibus Newtoni.
Leges Newtoni de Dynamica corporum
Prima Lex (de Inertia):
Absente causis externis, omnia corpora statum suum motus constantem servant.
Prima lex Newtoni ingeniose constituit duas quaestiones magni momenti pro physica. Prima et manifestior: momentum lineare tamquam magnitudinem conservatam statuit; secunda autem aeque gravis, sed implicitius posita, concedit nobis definire quid sit observator inertialis.
Multae sunt formae observatorem definire, sed inter omnes invenitur genus speciale quod observatorem inertialem appellamus. Differentia consistit in eo quod, ex prospectu observatoris inertialis, absente causa externa status motus corporum est magnitudo conservativa.
Quid distinguit observatorem inertialem ab eo qui non est?
Differentia consistit in eo quod, ex prospectu observatoris inertialis, absente causa externa status motus corporum est magnitudo conservativa.
Secunda Lex (de Vi et Massa):
Ex prospectu observatoris inertialis, vis ab agente externo corpori impressa aequivalet variationi status eius motus.
Aliter dicendo, si vis corpori applicatur \vec{F} tum habetur quod.
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
Relatio nota “vis aequalis massae per accelerationem”, \vec{F}=m\vec{a}, nihil aliud est quam consequentia Secundae Legis Newtoni, quae oritur ex proprietatibus derivationum et conservatione massae.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
In hoc ultimo passu consideratum est dm/dt=0 quia ponitur nullam massam addi aut auferri, et d\vec{v}/dt est definitio accelerationis.
Massa inertialis
Secunda lex Newtoni etiam concedit accuratius tractare de notione massae. Hic apparet ut constans proportionalitatis inter vim et accelerationem. Quanto maior est massa, tanto maior vis impellenda est ad eandem accelerationem obtinendam; unde intellegitur massam esse mensuram inertiae corporum atque hinc nomen massa inertialis. Si in duo corpora in quiete relativa ad observatorem inertialem eadem vis (sine permutatione materiae) agit, tunc habetur
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
Ex hoc possumus comparare massas corporum per rationem magnitudinum accelerationum
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Quapropter, si m_2 esset “unum kilogramma exemplar”, sufficit observare rationem \|\vec{a}_2\|/\|\vec{a}_1\| ut sciamus quot kilogrammata contineat m_1.
Tertia Lex (de Actione et Reactione):
Si corpus A vim “actionem” in aliud B exercet, tum B vim “reactionem” in A exercet aequalis magnitudinis sed contrariae directionis.
Tertia lex Newtoni non solum concedit accuratius de viribus disserere, sed etiam expresse statuit agentes externos qui vim applicant esse quoque obiecta physica eisdem obnoxia:
- Agens externus est obiectum physicum viribus affici posse.
- Vires numquam dantur seorsum, sed semper fiunt in paribus dictis “paribus actionis-reactionis”, et summa vectorialis horum parium semper est nulla.
- Paria actionis-reactionis semper occurrunt in corporibus diversis, ita ut vis totalis in corpus non sit necessario nulla.
Cum paria actionis-reactionis semper in linea recta exerceantur, hoc secum fert quod postea videbimus, scilicet conservationem momenti angularis.
Praeter haec, tertia lex Newtoni etiam implicite dicit alia:
- Ut vis neta non-nulla corpori applicari possit, necesse est saltem alterum obiectum.
- Actio et reactio simul fiunt. Cum duo corpora possint a distantia inter se agere (per gravitationem vel electromagnetismum), sequitur ut necessario in mechanica Newtoniana adsit modus transferendi informationem ex uno puncto ad alterum celeritate infinita. Scimus tale esse impossibile, quia secundum relativitatem specialem celeritas maxima est celeritas lucis in vacuo; ideo dicimus hanc tertiam legem esse approximationem ad realitatem.
Quomodo uti legibus Newtoni?
Ad intellegendum quomodo leges Newtoni adhibeantur ut earum significatio clara sit, optimum est ad exempla spectare quae in rebus concretis fundantur atque ad constructionem diagrammatum corporis liberi.
Diagrammata Corporis Liberi
Diagramma corporis liberi est schema pictorium in quo vires quae in corpus agunt repraesentantur. Pro ratione eorum quae de pondere recensuimus, possumus construere sequentia exempla diagrammatum corporis liberi.
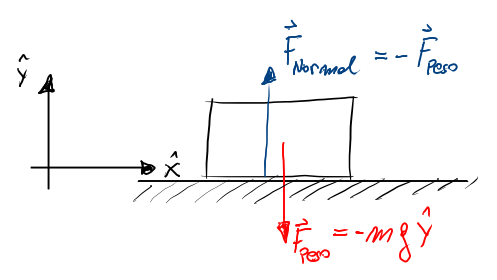
Corpus innixum in plano horizontali
Propter gravitatem, omnia corpora massa praedita sentiunt vim ad terram directam. Per secundam Legem Newtoni observamus talem vim dari per productum massae et accelerationis gravitatis \vec{g}=-g\hat{y}, ubi g=9,81[m/s^2].
\vec{F}_{peso}=m\vec{g} = -mg\hat{y}
Quod intellegimus ut “pondus” corporis re vera est magnitudo huius vis ponderis quam modo vidimus.
{pondus}=\|\vec{F}_{peso}\|= mg
Cum quadrum in plano horizontali deponimus, apparet par virium actionis-reactionis: hae sunt vis ponderis et normalis. Taliae vires sunt aequales magnitudine sed oppositae directione ita ut summa vectorialis virium in corpus sit nulla et, propterea, status eius motus in tempore constans maneat.
Lapsus in plano horizontali
Imaginamur nunc quadrum chorda alligari et trahi, ut ostenditur in sequenti diagrammate corporis liberi:
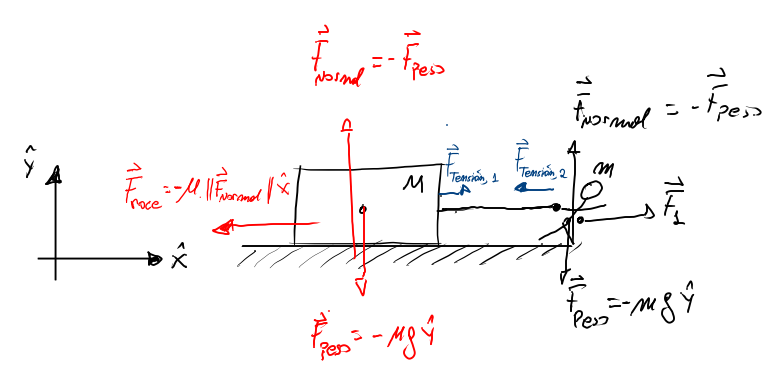
Hic cernimus apparentiam duorum parium actionis-reactionis: uno latere habemus paria cum viribus ponderis et normalibus corporum, tertium par actionis-reactionis cum extremis chordae quibus subiectum quadrum trahit, et ultimo par coniunctum vi impressa \vec{F}_1 et vi attritus,\vec{F}_{roce}, cuius valor maximus est \mu\|\vec{F}_\textnormal{normal}\|.
Coefficientia attritus et vires attritus
Hic \mu est coefficientia attritus quae exprimit resistentiam lapsui inter duas superficies; coefficientia attritus duas habet formas: unam kineticam (\mu_c) et alteram staticam (\mu_e). Attritus staticus apparet cum corpus in quiete manet, dum kineticus apparet cum corpus labi coepit.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Corpus in quiete} \\ \\ \mu_c & ;& \textnormal{Corpus in motu} \end{array}\right. & ; & \textnormal{Ubi } \mu_c \leq \mu_e\end{array}
Vis attritus motui corporis quod patitur opponitur et potest (simpliciter) exprimi per sequentem formulam
\vec{F}_\textnormal{roce} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{normal}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{normal}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{normal}\| \lt \|\vec{F}\| \end{array} \right.
Cum vis impressa minor vel aequalis sit attritui statico maximo, corpus in quiete manet respectu terrae. Si vis impressa maior est quam attritus staticus, tum corpus incipit moveri et attritus fit kineticus; vis neta in corpus est igitur: \vec{F}_{neta} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{normal}\|\hat{x}, et propterea movetur cum acceleratione \vec{a} = \vec{F}_{neta}/M. Si postquam corpus motum est vis impressa aequatur attritui kinetico, corpus igitur movetur cum velocitate constanti.
Lapsus in plano inclinato
Cum obiectum labitur per planum inclinatum ad angulum \alpha habetur sequens diagramma virium:
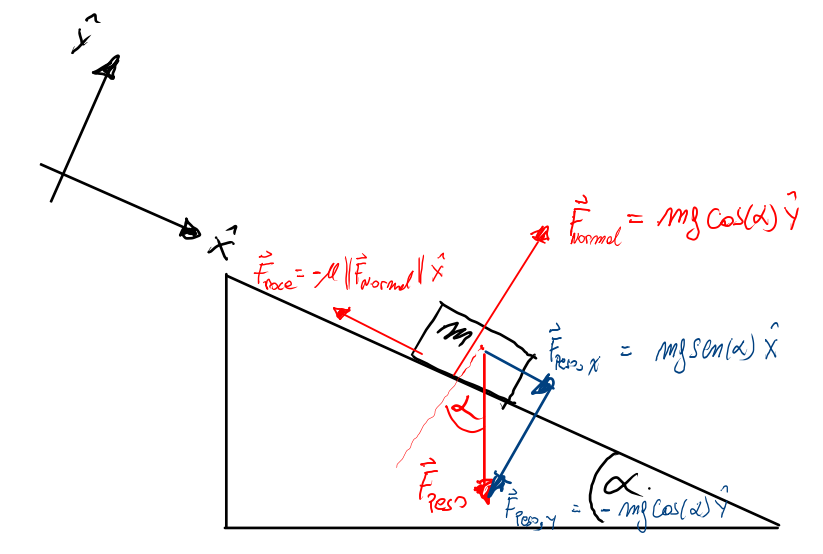
Hic, propter commoditatem, electum est systema referentiae ita dispositum ut coordinata horizontalis cum plano lapsus coniungatur. In hoc schemate, vis ponderis in duas partes dividitur: unam parallelum et alteram perpendicularum ad motum.
- Componente parallela: \vec{F}_{\textnormal{peso},x}=mg\sin(\alpha)\hat{x}
- Componente perpendicularis: \vec{F}_{peso,y}=-mg\cos(\alpha)\hat{y}
Vis attritus apparet ut reactio ad partem parallelum motui virium ponderis, et vis normalis ut reactio ad partem perpendicularem virium ponderis. Si pars horizontalis virium ponderis superat attritum staticum maximum, tum mutabitur status motus quadrati cum acceleratione
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Massa pendens
Massa quae e chorda ad laquearia adligata pendet et quae in quiete manet habet sequentem diagramma corporis liberi:
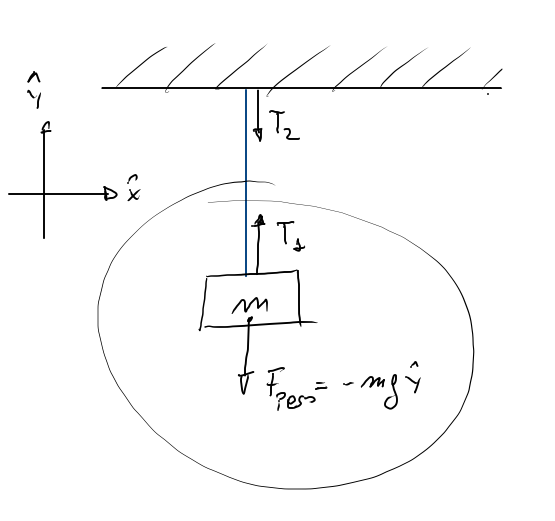
Massa quae e chorda ad laquearia adligata pendet et quae in quiete manet habet sequentem diagramma corporis liberi:
In chorda sunt par virium quas “tensiones” appellamus; si chorda est inextensibilis, hae vires sunt aequales et oppositae. In quadrum etiam agit par virium: pondus et tensio chordae. Si quadrum pendet et quiescit, pondus et tensio oppositae sunt et aequalis magnitudinis. Est quarta vis quae hic non ostenditur, quae chordam laqueari coniungit; coniunctio harum quattuor virium constituit duo paria actionis-reactionis.
Motus penduli simplicis
Massa ad chordam inextensibilem adligata, et haec ad laquearia, quae oscillat circa positionem aequilibrii propter pondus suum est quod pendulum simplex appellamus. Infra habemus eius diagramma corporis liberi.
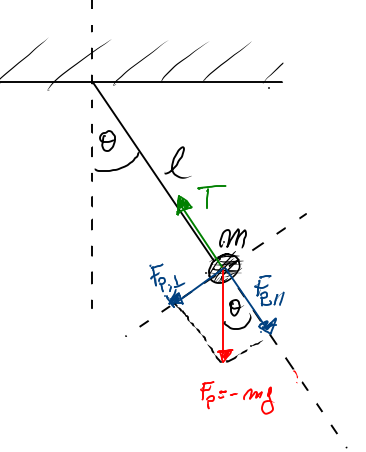
Cum chorda sit inextensibilis, habemus accelerationem radialem esse nullam et, consequenter:
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
Alterum autem, pro componente perpendiculare ad chordam habebitur
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
Ex hac ultima expressione possibile est inferre aequationem differentialem quae nobis permittet modelare positionem angularis \theta penduli simplicis in tempore
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
At obtentio huius aequationis et consequentiae quas ex ea deducere possumus sunt res quas postea diligentius videbimus.
Solutio problematum legibus Newtoni utens
Utere legibus Newtoni ad solvenda sequentia problemata:
- Quadrum 15[kg] in superficie horizontali ponitur. Inter quadrum et superficiem est attritus staticus \mu_e=0,55 et attritus kineticus \mu_c=0,31
- Quae erit vis minima necessaria ut quadrum moveri incipiat?
- Computa accelerationem quadri cum hoc incipit moveri propter vim in priori inciso obtentam.
- Quadrum 12[kg] in plano inclinabili ponitur. Si coefficientia attritus statici est \mu_e=0,03, determina angulum inclinationis maximum quo quadrum in quiete manebit.
- Quadrum 75[kg] ascendit cum velocitate constanti per planum inclinatum 30^o respectu horizontalis propter vim quae in eum horizontaliter applicatur. Si inter quadrum et superficiem plani est coefficientia attritus kinetici \mu_c=0,21, determina magnitudinem huius vis applicatae.
- Considera duas massas m_1 et m_2 chordae inextensibili et sine massa conexas quae per trochleam transit, ut in figura monstratur. Computa accelerationem amborum massarum.

- Chorda flexibilis massae M inter duas parietes pendet angulum \alpha in punctis coniunctionis formans. Computa tensionem chordae in puncto infimo.
- Corpus massae m circulos facit in plano x,y cum radio R et velocitate angulari \omega constanti. Computa vim in massam applicatam.

