
时空双曲旋转
摘要:
在本课中,我们将回顾如何将洛伦兹变换重新解释为时空旋转变换。我们将开始检查四维闵可夫斯基空间中的旋转,区分纯空间旋转和涉及时空轴的旋转。
学习目标:
完成本课后,学生将能够:
- 理解闵可夫斯基时空中的旋转变换。
- 理解洛伦兹变换作为时空旋转。
目录
简介
闵可夫斯基时空中的旋转
纯空间旋转
三维旋转的矩阵推广
具有时空坐标的事件的空间旋转
时空双曲旋转
引入速度参数
将时空旋转公式化为双曲旋转
结论
简介
到目前为止,我们详细检查了洛伦兹变换的形式,即观察到的闵可夫斯基时空中的一个特定事件的坐标如何从不同的惯性参考系中改变。接下来我们将从不同的角度来审视这些发展,将它们视为时空旋转变换。很快我们会发现,这种方法在代数上提供了优势,通常简化了计算,特别是在组合多个连续的洛伦兹变换时。
闵可夫斯基时空中的旋转
让我们开始分析在闵可夫斯基时空中执行的各种空间旋转。由于这是一个四维空间,最实用的方法是相对于特定平面进行旋转。因此,我们可以定义在xy、xz和yz平面上的旋转,以及在xt、yt和zt平面上的旋转。在由空间轴组成的平面中进行的旋转是纯空间旋转,而在由时空轴组成的平面中进行的旋转是时空旋转。目前,我们将专注于详细了解纯空间旋转,然后扩展到时空旋转。
纯空间旋转
让我们开始研究在xy平面上的旋转。为此,假设我们有一个点,其相对于\hat{x}和\hat{y}轴定义的坐标为(a,b)。然后,我们来分析将这些坐标与一个旋转的参考系观察到的坐标连接起来的关系。这个系统由旋转了一个角度\theta的\hat{x}^\prime和\hat{y}^\prime轴定义,如下图所示:

为了获得从每个系统测量的坐标(a,b)和(a^\prime,b^\prime)之间的关系,我们可以使用以下指导线:
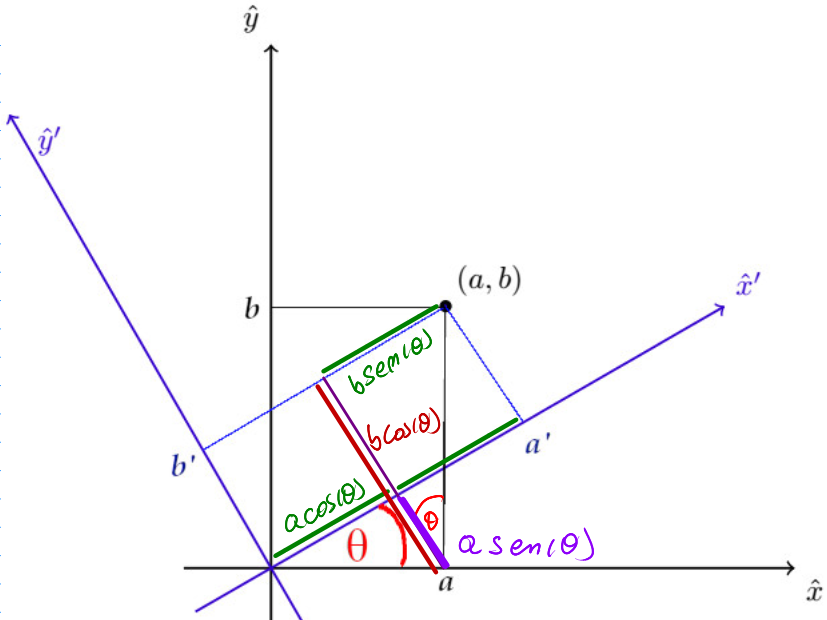
因此,现在很容易获得转换方程
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
三维旋转的矩阵推广
这种方程组可以更方便地表示为矩阵形式。
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
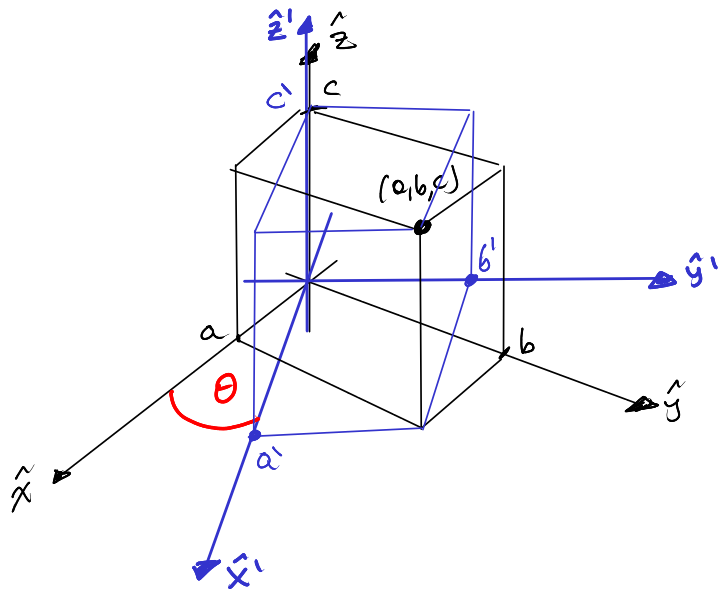
这是方便的,因为从这里很容易推广到更大的维度。例如,一个在\hat{x}、\hat{y}和\hat{z}轴定义的系统中的点,其坐标为(a,b,c),从另一个系统中观察到的,该系统由旋转了一个角度\theta相对于\hat{x}\hat{y}平面的轴定义,如下所示:
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
由此,我们得到了每个空间平面的不同旋转变换矩阵。
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{在}xy \text{平面上旋转一个角度} \theta \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{在}yz \text{平面上旋转一个角度} \theta \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{在}xz \text{平面上旋转一个角度} \theta \end{array} \end{array}
要计算这些旋转变换的逆变换,只需将\theta替换为-\theta。
具有时空坐标的事件的空间旋转
类似于如何从二维推广到三维,我们可以将其扩展到四维。为了与狭义相对论的语言保持一致,理解每个坐标的含义是重要的。通常,时空坐标表示如下:
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
在这里,上标不表示幂,而是指每个坐标的特征。上标为0的坐标表示时间维度,而上标为1、2和3的坐标对应空间维度。考虑到这一点,闵可夫斯基时空中的纯空间旋转通过以下关系描述:
关于xy平面的旋转: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
关于yz平面的旋转: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
关于xz平面的旋转: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
这些变换保持了与其三维对应的相同性质。
时空双曲旋转
引入速度参数
通过引入所谓的速度参数可以得到洛伦兹变换与空间旋转的相似性。
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
由于\beta_{ss^\prime_x}\in]-1,1[,因此\psi_{ss^\prime_x}\in\mathbb{R}。此外注意到,从中可以得到\gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x})和\gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x})。这可以通过以下计算得到:
显然\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x})等价于说\beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x});因此:
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
由于伽马因子和双曲余弦总是大于或等于1,最后可以证明\gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x})。
类似地,继续以前的计算,我们得到:
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
因此\gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x})。
将时空旋转公式化为双曲旋转
到这里,我们现在可以用速度参数重新编写洛伦兹变换中的速度提升因子和伽马因子。考虑两个惯性系S和S^\prime在标准配置中,其中第二个在x轴上施加了速度提升,\beta_{ss^\prime_x},有:
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
这种方程组可以表示为以下矩阵形式:
tx平面上的时空双曲旋转:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
类似地,我们可以得到每个时空平面的双曲旋转:
ty平面上的时空双曲旋转:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
tz平面上的时空双曲旋转:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
由于其形式和代数性质,这些变换与空间旋转非常相似,只是使用双曲函数而不是三角函数。虽然它们不是严格意义上的旋转,但它们与一开始审查的旋转有一定的相似性。例如,类似于旋转,逆变换通过将相应的速度参数\psi替换为-\psi来获得。这些变换有时被称为双曲旋转,速度参数也称为双曲角。
结论
到目前为止,我们已经全面讨论了闵可夫斯基时空中的旋转概念,这使我们能够更深入地理解洛伦兹变换。通过这项研究,我们达到了以下关键点:
- 重新解释洛伦兹变换:我们学会了将洛伦兹变换不仅视为由于不同参考系而引起的坐标变化,还视为时空旋转。
- 理解闵可夫斯基时空中的旋转:我们详细检查了四维闵可夫斯基空间内的旋转。
- 探索时空双曲旋转:最后,我们引入了时空双曲旋转的概念,检查了其与常规空间旋转的相似之处。