
运动学基础:位置、速度和加速度
摘要:
在这节课中,我们将复习运动学的基本概念:位置、速度和加速度。我们将探讨如何表示位置随时间的变化,区分瞬时速度和平均速度,以及瞬时加速度和平均加速度。此外,我们将推导出具有恒定加速度的运动方程,这对于预测物体的位置和速度至关重要。
学习目标:
在这节课结束时,学生将能够:
- 回忆运动学中位置、速度和加速度的基本定义。
- 分析加速度、速度和位置之间的关系。
- 应用导数和积分从加速度计算速度和位置,反之亦然。
- 理解瞬时速度和平均速度,以及瞬时加速度和平均加速度之间的区别。
介绍
通过积分加速度可以计算速度和位置,而通过求导位置可以得到速度和加速度。这些话概括了我们将探讨的运动学内容,我们的主要目标之一是理解这些术语的含义。运动代表了一种变化,自然界的一切都处于变化之中。因此,研究变化及其变化形式是物理学的基本支柱之一。
有很多变量是容易变化的:新事物变得陈旧,人们可以从一种职业转换到另一种职业,从健康到生病,反之亦然,以及从白天到黑夜,等等。这些都是变化的例子,但在研究运动学时,我们将专注于其中一种:位置或运动的变化。在对运动的研究中,我们可以看到两种互补的方法:一种是基于产生运动的原因,另一种是基于运动的方式,分别形成了动力学和运动学,这两者共同构成了力学。
在物理学中,我们将物理空间建模为一个向量空间,以方便表示诸如位置、速度和加速度等概念。通常,我们使用三维空间 \mathbb{R}^3 来实现这个目的,尽管理论上任何维度的空间都可以根据上下文来适用。
位置、空间和观察者
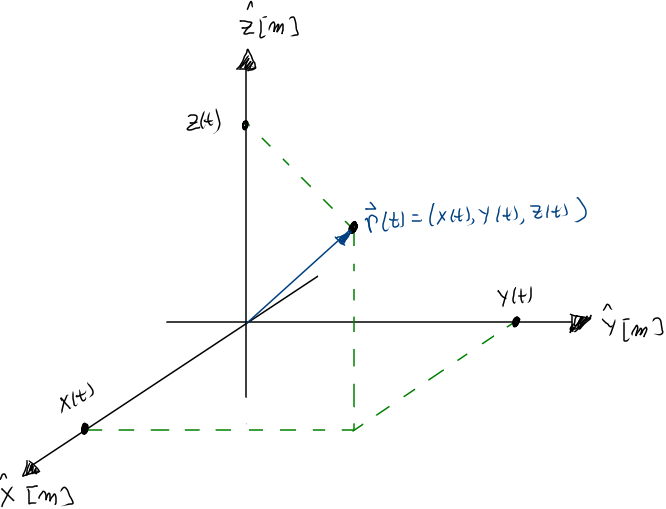
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
这是一个将位置 \vec{r}(t) 分配给每个 t\in\mathbb{R} 的函数,因此我们称之为位置函数(或简单地称为位置)。自变量 t 被称为“时间”,参数 n 对应于空间的“维度”。符号 [T] 和 [L] 分别指时间和长度的物理量,通常以“秒”和“米”为单位。
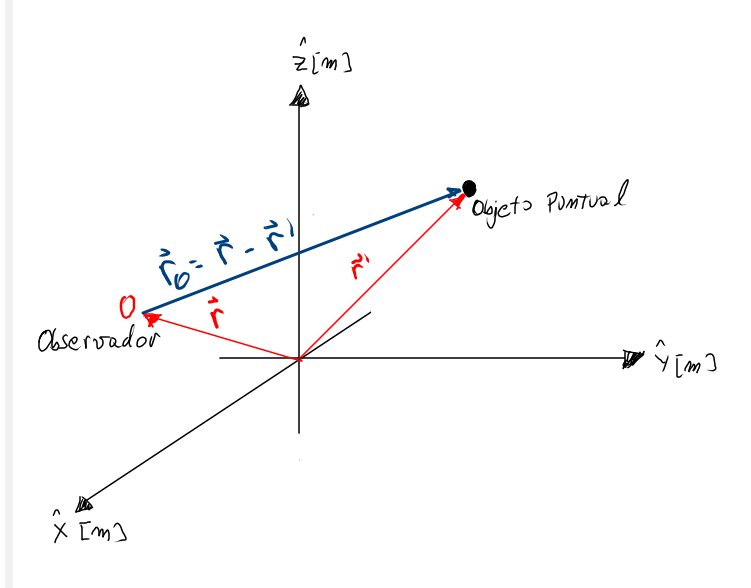
位置,像任何物理量一样,是由观察者测量的。在我给出的关于位置的描述中,我隐含地假设观察者具有零向量的坐标, \vec{0}。如果观察者 \mathcal{O} 拥有向量 \vec{r} 的坐标,而点物体拥有坐标 \vec{r}^\prime, 那么 相对于观察者的位置 将是:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
空间是所有可能位置的集合,也是相对于任何观察者的所有可能位置的集合。位置是时间的函数,用于数学上表示一个理想化物体称为“点物体”在每一时刻 t 所在的地方。点物体是一种理想化的概念,它是当我们剥夺一个真实物体的所有特性,包括大小和形状,只保留它“占据空间的位置”时剩下的东西。
位置通常是一个向量。向量由两个元素组成:大小和方向。相对于观察者的位置的大小是与观察者的距离,由公式 dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|. 表示。
从这里开始,强烈推荐掌握微积分课程中的内容,微分微分 和 积分。
速度和速率
如果位置对时间可微分, 那么可以定义相对于观察者 \mathcal{O}, \vec{v}_\mathcal{O}(t), 的速度如下:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
简单来说,速度是位置的时间导数,告诉我们在每个时刻 t 位置如何变化。
速度有两种类型:瞬时速度和平均速度。瞬时速度是刚才呈现的,平均速度则通过省略极限计算得到。在时间间隔长度 \Delta t, 上的平均速度 \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, 定义为
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
其中 \overline{t} 是包含在间隔 [t,t+\Delta t] 中的任何时刻。
从速度(无论是瞬时的还是平均的)中,可以定义速率作为其对应的大小。相对于观察者 \mathcal{O} 的速率是 v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, 平均速率 \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
速率和速度的单位是长度单位除以时间单位 [L/T],通常以“米每秒”来表示。
加速度
类似于速度, 如果它对时间可微分,那么可以定义相对于观察者 \mathcal{O} 的加速度 \vec{a}_\mathcal{O}(t), 如下:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
加速度是速度的时间导数,因此告诉我们速度如何随时间变化。
类似于速率,有瞬时加速度和平均加速度。瞬时加速度是我们刚刚回顾的,平均加速度是通过省略极限计算得到的。在时间间隔长度 \Delta t, 上的平均加速度 \left<\vec{a}_{\mathcal{O},\Delta t}\right>, 定义为
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
加速度的单位是长度单位除以时间的平方 [L/T^2],通常以“米每秒平方”来表示。
运动方程
假设我们有一个点物体 它相对于观察者 \mathcal{O} 以恒定加速度 \vec{a}_\mathcal{O}(t) = \vec{a}_0 运动。如果可以从位置导出速度和加速度,那么通过积分加速度可以计算速度和位置。这种方式得到的结果称为运动方程。
对 \vec{a}_\mathcal{O}(t) = \vec{a}_0 积分我们得到:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
再积分一次我们得到
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
这里,常数 \vec{v}_0 和 \vec{r}_0 是积分常数,代表相对于观察者 \mathcal{O} 的点物体的初速度和初位置。总结一下,运动方程是:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
通过这些方程,可以完整描述任何以恒定加速度运动的点物体的运动。这就建立了通过积分加速度可以计算速度和位置,而通过导数位置可以计算速度和加速度的概念。
请注意,这些是矢量方程,因此可以分解为它们的分量。如果我们在三维空间中对运动进行建模,那么我们将得到以下方式的每个分量:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
这样,就创建了一组9个方程,每个坐标轴一个。例如,对于 \hat{x} 轴,我们将有
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
通常,坐标 \hat{z} 用于表示高度,因此假设 a_{0z}=-g \approx -9.81[m/s^2]; 即在此轴上的加速度与地球重力产生的加速度有关。这被包括在方程中以模拟自由落体或投射物的发射等现象。
结论
在对运动学基础的这个旅程中,我们探索了如何使用数学来描述和理解物理空间中的运动。从在任意维度的空间中表示位置为一个向量到对矢量函数进行导数和积分以获得速度、加速度和运动方程,我们看到了这些概念如何交织在一起并应用于运动的分析。
运动学,通过研究不考虑产生它的原因的运动,为我们提供了一个纯粹且数学上优雅的点物体运动视角。使用微积分的工具,我们可以揭示运动模式并预测未来的轨迹,这在物理和工程的许多领域是至关重要的。
最后,在我们的方程中包含重力引起的加速度将带我们进入更具体的应用,例如自由落体和投射物的发射,证明了运动学在我们日常世界中的相关性和适用性。因此,运动学的研究不仅仅是一个理论练习,而且是理解和操纵我们周围物理世界的基本工具。