
Основы кинематики: положение, скорость и ускорение
Резюме:
На этом уроке мы рассмотрим основные понятия кинематики: положение, скорость и ускорение. Мы исследуем, как представить положение в зависимости от времени, различая мгновенные и средние скорость и ускорение. Кроме того, мы выведем уравнения движения с постоянным ускорением, необходимые для предсказания положения и скорости объекта.
ЦЕЛИ ОБУЧЕНИЯ:
В конце этого урока студенты смогут:
- Вспомнить базовые определения положения, скорости и ускорения в кинематике.
- Анализировать связи между ускорением, скоростью и положением.
- Применять производные и интегралы для вычисления скорости и положения на основе ускорения и наоборот.
- Понимать разницу между мгновенной и средней скоростью, а также между мгновенным и средним ускорением.
СОДЕРЖАНИЕ:
Введение
Положение, пространство и наблюдатели
Скорость и быстрота
Ускорение
Уравнения движения
Заключение
Введение
Из ускорения можно вычислить скорость и положение путем интегрирования по времени, а из положения можно вычислить скорость и ускорение путем дифференцирования по времени. Эти слова резюмируют то, что мы будем изучать в кинематике, и одной из наших основных целей будет понимание значения этих терминов. Движение представляет собой форму изменения, и все в природе подвержено изменениям. Поэтому изучение изменений и их вариаций является одним из фундаментальных столпов физики.
Есть много переменных, подверженных изменениям: новое становится старым, можно перейти от одной профессии к другой, от здоровья к болезни и наоборот, от дня к ночи и так далее. Все это примеры изменений, но в кинематике мы сосредоточимся на одном: изменении положения или движения. В изучении движения можно выделить два взаимодополняющих подхода: один основан на причинах, вызывающих его, а другой — на форме его развития, что приводит к Динамике и Кинематике, которые вместе образуют Механику.
В физике мы моделируем физическое пространство как векторное пространство, чтобы облегчить математическое представление таких понятий, как положение, скорость и ускорение. Обычно мы используем трехмерное пространство \mathbb{R}^3 для этой цели, хотя в теории пространства любой размерности могут быть подходящими в зависимости от контекста.
Положение, пространство и наблюдатели
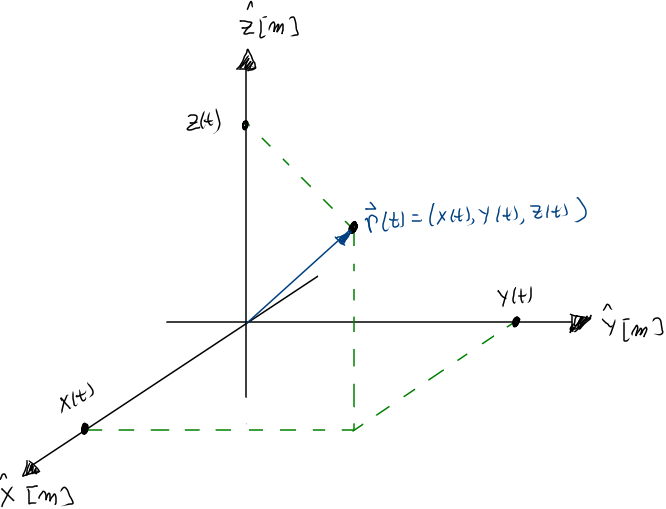
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Это функция, которая сопоставляет каждое t\in\mathbb{R} с положением \vec{r}(t), и поэтому мы называем ее функцией положения (или просто положением). Независимая переменная t называется «временем», а параметр n соответствует «размерности» пространства. Символы [T] и [L] относятся к физическим размерам времени и длины, обычно измеряемым в «секундах» и «метрах» соответственно.
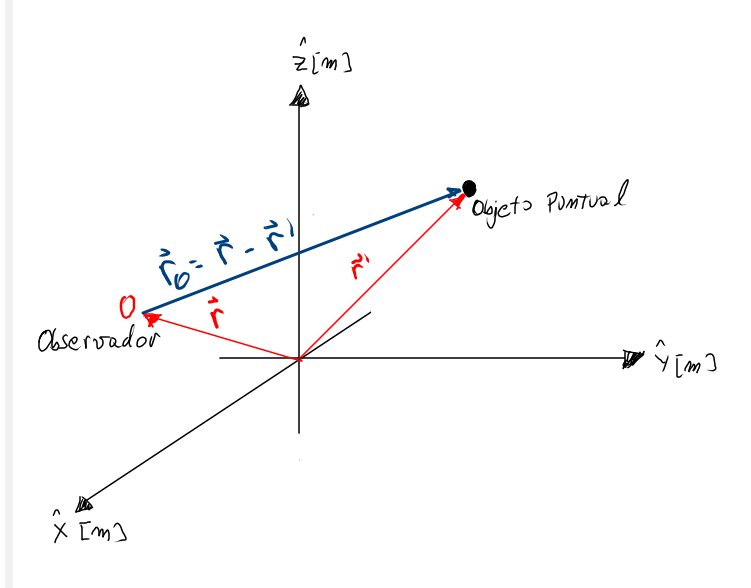
Положение, как и любая физическая величина, измеряется наблюдателем. В описании положения я подразумевал, что наблюдатель имеет координаты нулевого вектора, \vec{0}. Если наблюдатель \mathcal{O} имеет координаты вектора \vec{r} и точечный объект имеет координаты \vec{r}^\prime, то относительное положение наблюдателя будет:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
Пространство — это множество всех возможных положений, это также множество всех возможных положений относительно любого наблюдателя. Положение — это функция времени и используется для математического представления того места, где находится идеализированный объект, называемый «точечным объектом», в каждый момент времени t. Точечный объект — это идеализация, это то, что остается от реального объекта, когда мы лишаем его всех качеств, включая размер и форму, сохраняя только «место, которое он занимает в пространстве».
Положение обычно является вектором. Векторы состоят из двух элементов: величины и направления. Величина положения относительно наблюдателя — это расстояние до наблюдателя и определяется как dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
С этого момента настоятельно рекомендуется овладеть содержанием курса дифференциального исчисления и интегрирования.
Скорость и быстрота
Если положение дифференцируемо относительно времени, то можно определить скорость относительно наблюдателя \mathcal{O}, \vec{v}_\mathcal{O}(t), следующим образом:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
Проще говоря: скорость — это временная производная положения, и она показывает, как изменяется положение в каждый момент времени t.
Существуют два типа скоростей: мгновенная и средняя. Мгновенная скорость — это только что представленная скорость, средняя скорость получается путем исключения вычисления предела. Средняя скорость на временном интервале длиной \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, определяется как
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
где \overline{t} — это любой момент, содержащийся в интервале [t,t+\Delta t].
Из скорости (как мгновенной, так и средней) определяется быстрота как ее соответствующая величина. Быстрота относительно наблюдателя \mathcal{O} равна v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, а средняя быстрота \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
Быстрота и скорость измеряются в единицах длины на единицу времени, [L/T], обычно в «метрах в секунду».
Ускорение
Аналогично скорости, если она дифференцируема относительно времени, то можно определить понятие ускорения относительно наблюдателя \mathcal{O}, \vec{a}_\mathcal{O}(t), следующим образом:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
Ускорение — это временная производная скорости, и, следовательно, оно показывает, как изменяется скорость во времени.
Аналогично быстроте, существует мгновенное и среднее ускорение. Мгновенное ускорение — это только что рассмотренное, среднее ускорение получается путем исключения вычисления предела. Среднее ускорение на временном интервале длиной \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, определяется как
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
Ускорение измеряется в единицах длины на квадрат времени, [L/T^2], обычно в «метрах в секунду в квадрате».
Уравнения движения
Предположим, что у нас есть точечный объект, который движется относительно наблюдателя \mathcal{O} с постоянным ускорением \vec{a}_\mathcal{O}(t) = \vec{a}_0. Если можно вывести скорость и ускорение из положения, то из ускорения можно вычислить скорость и положение путем интегрирования. Полученные таким образом результаты известны как уравнения движения.
Интегрируя \vec{a}_\mathcal{O}(t) = \vec{a}_0, получаем:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
И интегрируя снова, получаем
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Здесь константы \vec{v}_0 и \vec{r}_0 — это константы интегрирования, представляющие начальное положение и скорость точечного объекта относительно наблюдателя \mathcal{O}. Вкратце, уравнения движения следующие:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
С помощью этих уравнений можно полностью описать движение любого точечного объекта, движущегося с постоянным ускорением. Это устанавливает, что из ускорения можно вычислить скорость и положение путем интегрирования, а из положения можно вычислить скорость и ускорение путем дифференцирования.
Обратите внимание, что это векторные уравнения, и поэтому их можно разделить на их компоненты. Если мы моделируем движение в трехмерном пространстве, то для каждого оси мы получим следующие компоненты:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Таким образом, мы получаем набор из 9 уравнений, по одному для каждой оси координат. Например, для оси \hat{x} у нас будет
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
Как правило, координата \hat{z} резервируется для высоты, поэтому предполагается, что a_{0z}=-g \approx -9.81[m/s^2];, то есть ускорение в этой оси связано с ускорением, вызванным земным тяготением. Это включается в уравнения для моделирования явлений, таких как свободное падение или запуск снаряда.
Заключение
В этом обзоре основ кинематики мы исследовали, как использовать математику для описания и понимания движения в физическом пространстве. От представления положения как вектора в пространстве произвольной размерности до дифференцирования и интегрирования векторных функций для получения скорости, ускорения и уравнений движения, мы видели, как эти концепции переплетаются и применяются в анализе движения.
Кинематика, изучая движение без учета причин, вызывающих его, предлагает нам чистую и математически изящную перспективу движения точечных объектов. С помощью инструментов дифференциального и интегрального исчисления мы можем выявлять закономерности движения и предсказывать будущие траектории, что необходимо во многих областях физики и инженерии.
Наконец, включение ускорения, вызванного гравитацией, в наши уравнения приведет нас к более конкретным приложениям, таким как свободное падение и запуск снарядов, демонстрируя актуальность и применимость кинематики в нашей повседневной жизни. Поэтому изучение кинематики — это не просто теоретическое упражнение, а фундаментальный инструмент для понимания и управления физическим миром вокруг нас.