
Fundamentos da Cinemática: Posição, Velocidade e Aceleração
Resumo:
Nesta aula, revisaremos os conceitos fundamentais da cinemática: posição, velocidade e aceleração. Exploraremos como representar a posição em função do tempo, diferenciando entre velocidade e aceleração instantâneas e médias. Além disso, deduziremos as equações do movimento com aceleração constante, essenciais para prever a posição e a velocidade de um objeto.
OBJETIVOS DE APRENDIZAGEM:
Ao final desta aula, os estudantes serão capazes de:
- Recordar as definições básicas de posição, velocidade e aceleração na cinemática.
- Analisar as relações entre aceleração, velocidade e posição.
- Aplicar derivadas e integrais para calcular a velocidade e a posição a partir da aceleração, e vice-versa.
- Compreender a diferença entre velocidade instantânea e média, e entre aceleração instantânea e média.
ÍNDICE DE CONTEÚDOS
Introdução
Posição, Espaço e Observadores
Velocidade e Rapidez
Aceleração
Equações de Itinerário
Conclusão
Introdução
A partir da aceleração, é possível calcular a velocidade e a posição por meio da integração em relação ao tempo, e a partir da posição, podemos calcular a velocidade e a aceleração por meio da diferenciação em relação ao tempo. Estas palavras resumem o que exploraremos sobre cinemática, e um dos nossos principais objetivos será entender o significado destes termos. O movimento representa uma forma de mudança, e tudo na natureza está sujeito a mudanças. Portanto, o estudo da mudança e de suas variações é um dos pilares fundamentais da física.
Existem muitas variáveis suscetíveis a mudanças: o novo se torna velho, pode-se mudar de uma profissão para outra, de saudável para doente e vice-versa, e de dia para noite, entre outras. Todos estes são exemplos de mudanças, mas ao estudar cinemática, focaremos em uma em particular: a mudança de posição ou movimento. No estudo do movimento, podemos apreciar duas abordagens complementares: uma baseada nas causas que o produzem e outra na forma como se desenvolve, dando origem à Dinâmica e à Cinemática, que juntas formam a Mecânica.
Na física, modelamos o espaço físico como um espaço vetorial para facilitar a representação matemática de conceitos como posição, velocidade e aceleração. Comumente, usamos o espaço tridimensional \mathbb{R}^3 para este propósito, embora, em teoria, espaços de qualquer dimensão possam ser adequados conforme o contexto.
Posição, Espaço e Observadores
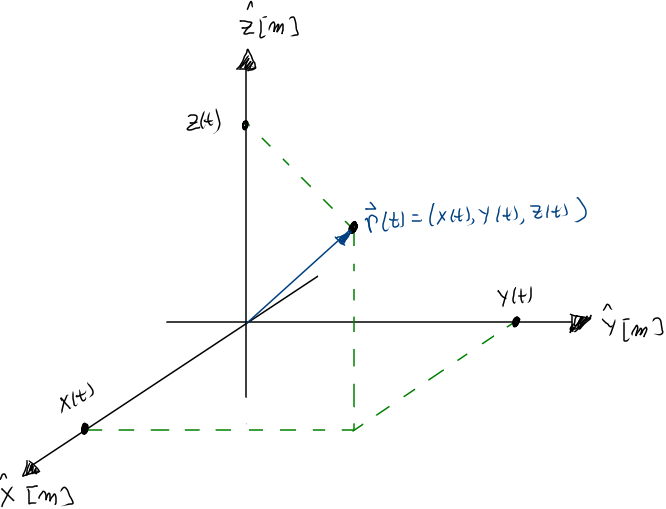
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Esta é uma função que atribui uma posição \vec{r}(t) a cada t\in\mathbb{R}, e, portanto, dizemos que é uma função de posição (ou simplesmente posição). A variável independente t é chamada de “tempo,” e o parâmetro n corresponde à “dimensão” do espaço. Os símbolos [T] e [L] referem-se às dimensões físicas de tempo e comprimento, geralmente medidas em “segundos” e “metros,” respectivamente.
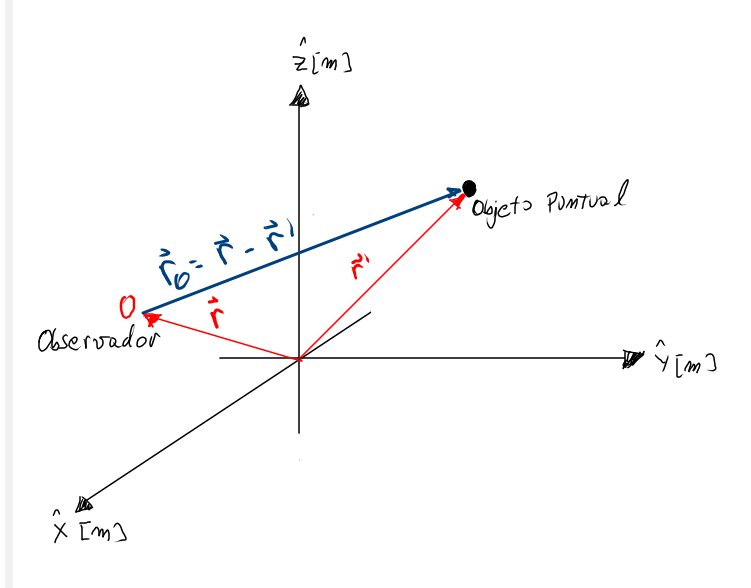
A posição, como qualquer grandeza física, é medida por um observador. Na descrição que dei da posição, assumi implicitamente que o observador tem as coordenadas do vetor nulo, \vec{0}. Se o observador \mathcal{O} tem as coordenadas do vetor \vec{r} e o objeto pontual tem coordenadas \vec{r}^\prime, então a posição relativa ao observador será:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
O espaço é o conjunto de todas as posições possíveis, é também o conjunto de todas as posições possíveis relativas a qualquer observador. A posição é uma função do tempo e é usada para representar matematicamente o lugar onde se encontra um objeto ideal chamado “objeto pontual” em cada instante t. O objeto pontual é uma idealização, é o que resta de um objeto real quando o despojamos de todas as suas qualidades, incluindo tamanho e forma, mantendo apenas o “lugar que ocupa no espaço.”
A posição geralmente é um vetor. Vetores são compostos por dois elementos: magnitude e direção. A magnitude da posição relativa a um observador é a distância ao observador e é dada por dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
A partir deste ponto, é altamente recomendável dominar os conteúdos do curso de cálculo diferencial e integral.
Rapidez e Velocidade
Se a posição é diferenciável em relação ao tempo, então é possível definir a velocidade relativa a um observador \mathcal{O}, \vec{v}_\mathcal{O}(t), da seguinte maneira:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
Em termos simples: a velocidade é a derivada temporal da posição e nos diz como a posição muda a cada instante t.
Existem dois tipos de velocidades: a instantânea e a média. A velocidade instantânea é a recém-apresentada, a velocidade média é obtida omitindo o cálculo do limite. A velocidade média sobre o intervalo de tempo de comprimento \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, é definida como
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
onde \overline{t} é qualquer instante contido no intervalo [t,t+\Delta t].
A partir da velocidade (seja instantânea ou média) se define a rapidez como sua magnitude correspondente. A rapidez relativa a um observador \mathcal{O} é v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, e a rapidez média \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
A rapidez e a velocidade são medidas em unidades de comprimento sobre unidades de tempo, [L/T], geralmente em “metros por segundo”.
Aceleração
De maneira similar à velocidade, se for diferenciável em relação ao tempo, então é possível definir o conceito de aceleração relativa a um observador \mathcal{O}, \vec{a}_\mathcal{O}(t), da seguinte forma:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
A aceleração é a derivada temporal da velocidade e, consequentemente, nos diz como a velocidade muda ao longo do tempo.
De forma semelhante à rapidez, existe a aceleração instantânea e a aceleração média. A aceleração instantânea é a que acabamos de revisar, a aceleração média é obtida omitindo o cálculo do limite. A aceleração média sobre o intervalo de tempo de comprimento \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, é definida como
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
A aceleração é medida em unidades de comprimento sobre tempo ao quadrado, [L/T^2], geralmente em “metros por segundo ao quadrado”.
Equações de Movimento
Suponhamos que temos um objeto pontual que se move em relação a um observador \mathcal{O} com uma aceleração constante \vec{a}_\mathcal{O}(t) = \vec{a}_0. Se for possível derivar velocidade e aceleração a partir da posição, então a partir da aceleração, é possível calcular a velocidade e a posição integrando. Os resultados obtidos desta maneira são conhecidos como equações de movimento.
Integrando \vec{a}_\mathcal{O}(t) = \vec{a}_0 temos:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
E integrando novamente obtemos
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Aqui, as constantes \vec{v}_0 e \vec{r}_0 são constantes de integração que representam a velocidade e posição iniciais do objeto pontual relativo ao observador \mathcal{O}. Em resumo, as equações de movimento são:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
Por meio dessas equações, é possível descrever completamente o movimento de qualquer objeto pontual que se mova com aceleração constante. Isso estabelece que a partir da aceleração, é possível calcular a velocidade e a posição integrando, e a partir da posição, é possível calcular a velocidade e a aceleração derivando.
Note-se que estas são equações vetoriais, e portanto, podem ser separadas em seus componentes. Se estamos modelando um movimento em um espaço tridimensional, então teremos cada componente separada da seguinte maneira:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Assim, criam-se um conjunto de 9 equações, uma para cada eixo coordenado. Por exemplo, para o eixo \hat{x}, teremos
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
Geralmente, a coordenada \hat{z} é reservada para a altura, por isso se assume que a_{0z}=-g \approx -9.81[m/s^2]; ou seja, a aceleração neste eixo está associada à aceleração produzida pela gravidade terrestre. Isso é incluído nas equações para modelar fenômenos como a queda livre ou o lançamento de um projétil.
Conclusão
Neste percurso pelos fundamentos da cinemática, exploramos como a matemática é utilizada para descrever e entender o movimento no espaço físico. Desde a representação da posição como um vetor em um espaço de dimensão arbitrária até a derivação e integração de funções vetoriais para obter velocidade, aceleração e as equações de movimento, vimos como esses conceitos se entrelaçam e se aplicam na análise do movimento.
A cinemática, ao estudar o movimento sem considerar as causas que o produzem, nos oferece uma perspectiva pura e matematicamente elegante do movimento dos objetos pontuais. Com as ferramentas do cálculo diferencial e integral, podemos desvendar padrões de movimento e prever trajetórias futuras, o que é essencial em muitas áreas da física e da engenharia.
Finalmente, a inclusão da aceleração devido à gravidade em nossas equações nos levará a aplicações mais concretas, como a queda livre e o lançamento de projéteis, demonstrando a relevância e aplicabilidade da cinemática em nosso mundo cotidiano. Portanto, o estudo da cinemática não é apenas um exercício teórico, mas uma ferramenta fundamental para compreender e manipular o mundo físico que nos rodeia.