
運動学の基礎:位置、速度、加速度
要約:
本講義では、運動学の基本的な概念である位置、速度、加速度について確認する。時間に対する位置の表現方法を探究し、瞬間的および平均的な速度と加速度を区別する。さらに、物体の位置と速度を予測するために不可欠な、等加速度運動の方程式を導出する。
学習目標:
本講義終了時には、学生は次のことができるようになる:
- 想起する 運動学における位置、速度、加速度の基本的な定義。
- 分析する 加速度、速度、位置の関係。
- 適用する 微分および積分を用いて、加速度から速度と位置を求め、またその逆を計算する。
- 理解する 瞬間速度と平均速度、瞬間加速度と平均加速度の違い。
内容目次
序論
位置、空間、観測者
速度と速さ
加速度
運動方程式
結論
序論
加速度から、時間に関して積分することで速度や位置を計算することができ、また位置から、時間に関して微分することで速度や加速度を計算することができる。これらの言葉は運動学において探究する内容を要約しており、主要な目的の一つはこれらの用語の意味を理解することである。運動とは変化の一形態であり、自然界に存在するすべては変化に従う。したがって、変化とその変動の研究は物理学の基本的な柱の一つである。
変化の対象となる変数は多く存在する。新しいものは古くなり、人はある職業から別の職業へ移り変わり、健康から病気へ、あるいはその逆へ、昼から夜へと移行するなどである。これらはすべて変化の例であるが、運動学の研究では、特に位置の変化、すなわち運動に焦点を当てる。運動の研究においては、それを引き起こす原因に基づくアプローチと、それが展開される様式に基づくアプローチという、二つの補完的な視点がある。これによって、力学を構成する二つの分野、すなわち動力学と運動学が生まれる。
物理学では、位置、速度、加速度といった概念を数学的に表現しやすくするために、物理空間をベクトル空間としてモデル化する。一般的には、この目的のために三次元空間 \mathbb{R}^3 が用いられるが、理論的には状況に応じて任意の次元の空間が適用可能である。
位置、空間、観測者
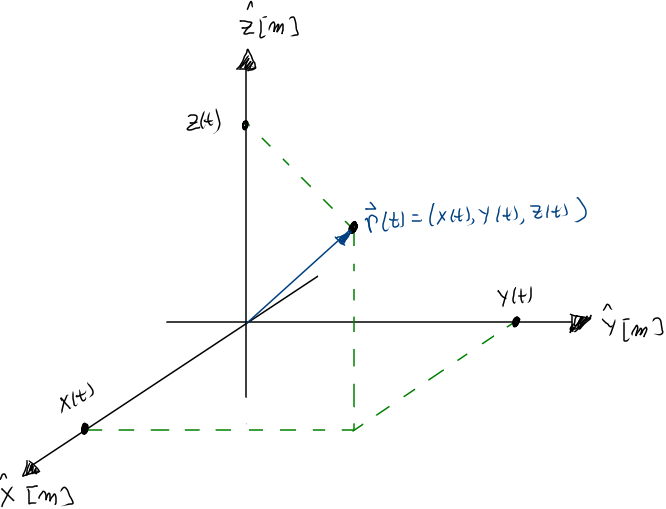
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
これは、それぞれの t\in\mathbb{R} に位置 \vec{r}(t) を対応させる関数であり、したがって位置関数(または単に位置)と呼ばれる。独立変数 t は「時間」と呼ばれ、パラメータ n は空間の「次元」に対応する。[T] および [L] は、それぞれ時間と長さの物理次元を表し、通常は「秒」および「メートル」で測定される。
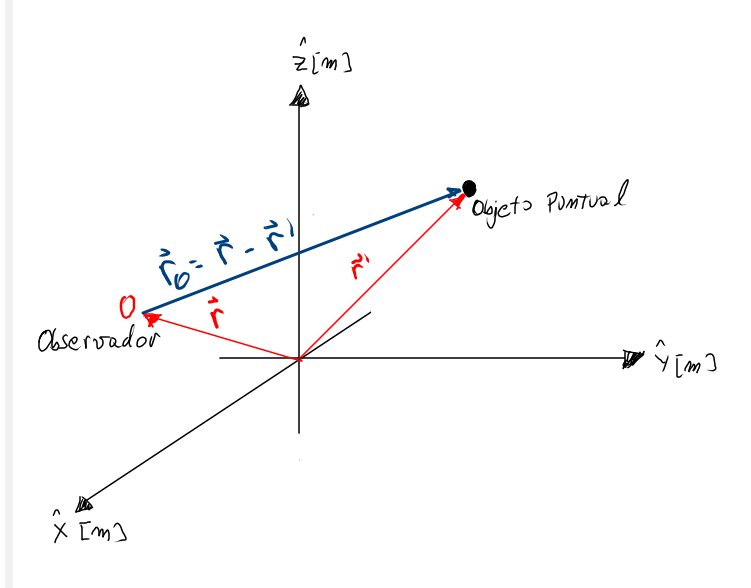
位置は、他のあらゆる物理量と同様に、観測者によって測定される。位置の記述において、暗黙的に観測者が零ベクトル \vec{0} の座標を持つと仮定してきた。もし観測者 \mathcal{O} がベクトル \vec{r} の座標を持ち、点状物体が座標 \vec{r}^\prime, を持つならば、観測者に対する相対位置は次のように表される:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
空間とは、すべての可能な位置の集合であり、また任意の観測者に対するすべての可能な位置の集合でもある。位置は時間の関数であり、理想的な「点状物体」が各時刻 t に存在する場所を数学的に表すために用いられる。点状物体とは理想化された概念であり、実在の物体から大きさや形を含むすべての性質を取り去り、空間に占める「場所」のみを保持したものである。
位置は一般的にベクトルである。ベクトルは大きさと方向の二つの要素から成る。観測者に対する相対位置の大きさは観測者までの距離であり、次の式で与えられる:dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
この時点から、微分および積分の計算の内容を十分に習得しておくことが強く推奨される。
速さと速度
もし位置が時間に関して微分可能であれば、観測者 \mathcal{O}, に対する速度 \vec{v}_\mathcal{O}(t), を次のように定義できる:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
簡単に言えば、速度とは位置の時間微分であり、各時刻 t において位置がどのように変化するかを示す。
速度には二つの種類が存在する:瞬間速度と平均速度である。瞬間速度は先に示したものであり、平均速度は極限の計算を省略することで得られる。時間間隔の長さ \Delta t における平均速度 \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> は次のように定義される:
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
ここで \overline{t} は区間 [t,t+\Delta t] に含まれる任意の時刻である。
速度(瞬間または平均)から、その大きさとして速さが定義される。観測者 \mathcal{O} に対する速さは v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, 平均速さは \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|. である。
速さと速度は、時間あたりの長さの単位で測定され、[L/T]、すなわち通常「メートル毎秒」で表される。
加速度
速度の場合と同様に、時間に関して微分可能であれば、観測者 \mathcal{O}, に対する加速度 \vec{a}_\mathcal{O}(t), を次のように定義できる:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
加速度とは速度の時間微分であり、その結果、速度が時間とともにどのように変化するかを示す。
速さの場合と同様に、加速度にも瞬間加速度と平均加速度が存在する。瞬間加速度は先ほど確認したものであり、平均加速度は極限の計算を省略することで得られる。時間間隔の長さ \Delta t における平均加速度 \left<\vec{a}_{\mathcal{O},\Delta t}\right> は次のように定義される:
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
加速度は長さを時間の二乗で割った単位、すなわち [L/T^2] で測定され、通常は「メートル毎秒毎秒」で表される。
運動方程式
質点を考えよう。この質点が観測者 \mathcal{O} に対して一定の加速度 \vec{a}_\mathcal{O}(t) = \vec{a}_0 で運動していると仮定する。位置から速度や加速度を導くことができるならば、加速度から速度と位置を積分によって求めることができる。このようにして得られる結果を運動方程式と呼ぶ。
\vec{a}_\mathcal{O}(t) = \vec{a}_0 を積分すると次のようになる:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
さらにもう一度積分すると次が得られる:
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
ここで定数 \vec{v}_0 と \vec{r}_0 は積分定数であり、観測者 \mathcal{O} に対する質点の初速度および初期位置を表す。まとめると、運動方程式は次のようになる:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
これらの方程式を用いることで、一定の加速度で運動する任意の質点の運動を完全に記述することができる。すなわち、加速度から積分によって速度と位置を求めることができ、また位置から微分によって速度と加速度を求めることができることを示している。
これらはベクトル方程式であるため、成分ごとに分けることができる。三次元空間における運動をモデル化している場合、各成分は次のように分離される:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
このようにして、各座標軸に対して1つずつ、合計9つの方程式が得られる。例えば、\hat{x} 軸に対しては次のようになる:
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
一般に、座標 \hat{z} は高さに対応するとされ、a_{0z}=-g \approx -9.81[m/s^2] と仮定される。つまり、この軸の加速度は地球の重力による加速度と関連付けられる。このことは、自由落下や投射運動のような現象をモデル化する際に方程式へ組み込まれる。
結論
運動学の基礎をたどる中で、物理空間における運動を記述し理解するために数学がどのように用いられるかを探究した。位置を任意次元の空間におけるベクトルとして表現することから始まり、速度や加速度、さらに運動方程式を得るためにベクトル関数を微分・積分する過程を通じて、これらの概念がどのように結びつき、運動の解析に応用されるかを見てきた。
運動学は、その原因を考慮せずに運動を研究することによって、質点の運動に関する純粋で数学的に洗練された視点を提供する。微分積分学の道具を用いることで、運動のパターンを解明し、将来の軌道を予測することができ、これは物理学や工学の多くの分野で不可欠である。
最後に、重力による加速度を方程式に含めることで、自由落下や投射運動といったより具体的な応用へとつながり、運動学が日常世界においていかに重要で適用可能であるかを示す。したがって、運動学の研究は単なる理論的な演習ではなく、私たちを取り巻く物理的世界を理解し操作するための基本的な道具である。