
स्पेसटाइम के हाइपरबोलिक रोटेशन
सारांश:
इस कक्षा में हम देखेंगे कि कैसे लॉरेंज़ ट्रांसफॉर्मेशन को स्पेसटाइम रोटेशन ट्रांसफॉर्मेशन के रूप में पुनःव्याख्या की जा सकती है। हम मिंकॉव्स्की के चार-आयामी स्थान में रोटेशन की जांच शुरू करेंगे, केवल स्थानिक रोटेशन और उन रोटेशन के बीच अंतर करेंगे जो स्पेसटाइम अक्षों को शामिल करते हैं।
शिक्षण उद्देश्यों:
इस कक्षा के अंत में, छात्र सक्षम होंगे:
- समझना मिंकॉव्स्की स्पेसटाइम में रोटेशन ट्रांसफॉर्मेशन को।
- समझना लॉरेंज़ ट्रांसफॉर्मेशन को स्पेसटाइम रोटेशन के रूप में।
सूचकांक
परिचय
मिंकॉव्स्की स्पेसटाइम में रोटेशन
शुद्ध स्थानिक रोटेशन
त्रिविमीय रोटेशन के लिए मैट्रिक्स सामान्यीकरण
स्पेसटाइम कॉर्डिनेट्स के साथ घटनाओं के लिए स्थानिक रोटेशन
स्पेसटाइम के हाइपरबोलिक रोटेशन
वेग पैरामीटर का परिचय
हाइपरबोलिक रोटेशन के रूप में स्पेसटाइम रोटेशन को सूत्रबद्ध करना
निष्कर्ष
परिचय
इस बिंदु तक, हमने विस्तृत रूप से देखा है कि कैसे लॉरेंज़ ट्रांसफॉर्मेशन होते हैं, अर्थात् मिंकॉव्स्की स्पेसटाइम में किसी विशेष घटना के कॉर्डिनेट्स अलग-अलग जड़त्वीय संदर्भ फ्रेमों से देखे जाने पर कैसे बदलते हैं। अब हम इन विकासों के लिए एक अलग दृष्टिकोण की समीक्षा करेंगे, उन्हें स्पेसटाइम रोटेशन ट्रांसफॉर्मेशन के रूप में देखते हुए। हम जल्द ही पाएंगे कि यह दृष्टिकोण गणितीय स्तर पर लाभ प्रदान करता है, जो सामान्यतः गणनाओं को सरल बनाता है, विशेष रूप से कई लॉरेंज़ ट्रांसफॉर्मेशन को लगातार संयोजित करने के समय।
मिंकॉव्स्की स्पेसटाइम में रोटेशन
आइए हम मिंकॉव्स्की स्पेसटाइम में विभिन्न स्थानिक रोटेशन की जांच करें। चूंकि यह एक चार-आयामी स्थान है, एक विशिष्ट विमान के संबंध में एक रोटेशन स्थापित करना सबसे व्यावहारिक है। इस प्रकार, हम xy, xz और yz विमानों पर रोटेशन को परिभाषित कर सकते हैं, साथ ही xt, yt और zt विमानों पर भी। स्थानिक अक्षों द्वारा बने विमानों में किए गए रोटेशन शुद्ध स्थानिक रोटेशन होते हैं, जबकि स्थान और समय के अक्षों द्वारा बने विमानों में किए गए रोटेशन स्पेसटाइम रोटेशन होते हैं। फिलहाल, हम शुद्ध स्थानिक रोटेशन को समझने पर ध्यान केंद्रित करेंगे ताकि बाद में इस ज्ञान को स्पेसटाइम रोटेशन तक विस्तारित किया जा सके।
शुद्ध स्थानिक रोटेशन
आइए हम xy विमान में रोटेशन कैसे की जाती हैं, इसका अध्ययन करते हुए हमारे स्थानिक रोटेशन की समीक्षा शुरू करें। इसके लिए, मान लें कि हमारे पास (a,b) कॉर्डिनेट्स के साथ एक बिंदु है जो \hat{x} और \hat{y} अक्षों द्वारा परिभाषित प्रणाली के संदर्भ में है। फिर, हम उस संबंध का विश्लेषण करेंगे जो इन कॉर्डिनेट्स को उस प्रणाली के संदर्भ में देखे गए कॉर्डिनेट्स के साथ जोड़ता है। यह प्रणाली \hat{x}^\prime और \hat{y}^\prime अक्षों द्वारा परिभाषित है, जो मूल प्रणाली के संबंध में \theta कोण पर घूमे हुए हैं, जैसा कि निम्नलिखित चित्र में दिखाया गया है:

हर प्रणाली से मापे गए कॉर्डिनेट्स (a,b) और (a^\prime,b^\prime) के बीच संबंध प्राप्त करना आसान हो जाता है।
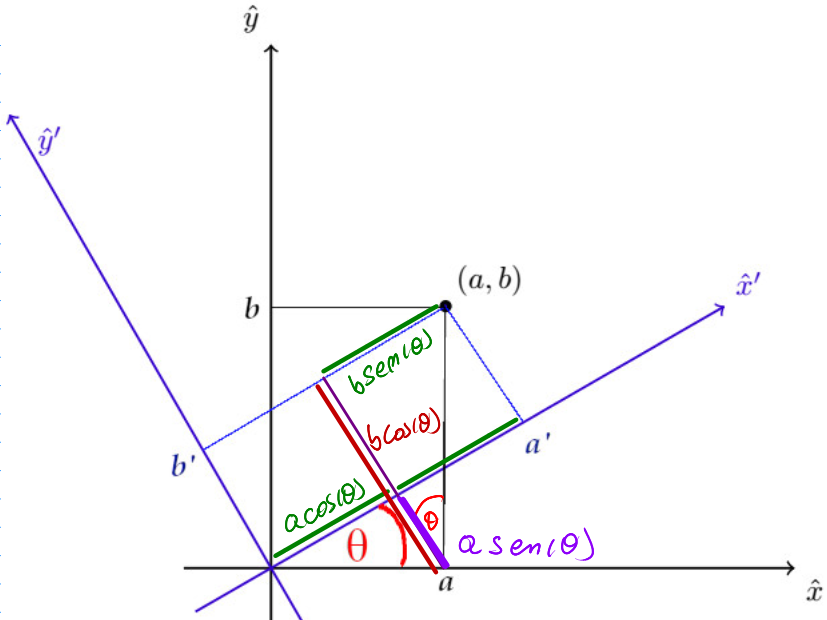
इस प्रकार अब हमें ट्रांसफॉर्मेशन समीकरण प्राप्त करना आसान हो जाता है।
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
त्रिविमीय रोटेशन के लिए मैट्रिक्स सामान्यीकरण
इन समीकरणों को अधिक सुविधाजनक रूप में मैट्रिक्स के रूप में प्रस्तुत किया जा सकता है।
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
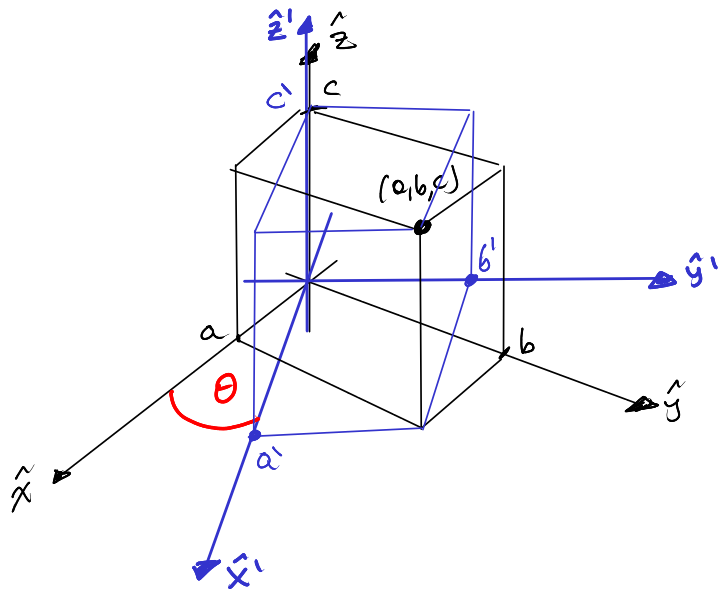
यह सुविधाजनक है, क्योंकि यहां से बड़ी आयामों के लिए सामान्यीकरण करना आसान हो जाता है। उदाहरण के लिए, (a,b,c) कॉर्डिनेट्स के साथ एक बिंदु जो \hat{x}, \hat{y} और \hat{z} अक्षों द्वारा परिभाषित प्रणाली में है, दूसरे प्रणाली से देखा गया है जो \hat{x}^\prime, \hat{y}^\prime और \hat{z}^\prime अक्षों द्वारा परिभाषित है, जो मूल प्रणाली के संबंध में \theta कोण पर घूमे हुए हैं, होगा:
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
इससे, हमें प्रत्येक स्थानिक विमान के लिए रोटेशन ट्रांसफॉर्मेशन की विभिन्न मैट्रिक्स प्राप्त होती हैं।
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{Rotación en un ángulo }\theta\\ \text{sobre el plano }xy \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotación en un ángulo }\theta\\ \text{sobre el plano }yz \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotación en un ángulo }\theta\\ \text{sobre el plano }xz \end{array} \end{array}
इन रोटेशन ट्रांसफॉर्मेशन के विपरीत ट्रांसफॉर्मेशन की गणना करने के लिए, \theta को -\theta के साथ प्रतिस्थापित करना पर्याप्त है।
स्पेसटाइम कॉर्डिनेट्स के साथ घटनाओं के लिए स्थानिक रोटेशन
जैसे हमने दो से तीन आयामों में सामान्यीकरण किया है, हम इसे चार आयामों में भी विस्तारित कर सकते हैं। विशेष सापेक्षता की भाषा के साथ सुसंगत रहने के लिए, प्रत्येक कॉर्डिनेट के अर्थ को समझना महत्वपूर्ण है। सामान्यतः, स्पेसटाइम कॉर्डिनेट्स निम्नलिखित तरीके से व्यक्त किए जाते हैं:
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
यहां, सुपरस्क्रिप्ट पोटेंशियल को नहीं दर्शाते हैं, बल्कि प्रत्येक कॉर्डिनेट की विशेषताओं को इंगित करते हैं। सुपरस्क्रिप्ट 0 के साथ कॉर्डिनेट समय आयाम का प्रतिनिधित्व करता है, जबकि सुपरस्क्रिप्ट 1, 2 और 3 के साथ कॉर्डिनेट्स स्थानिक आयामों के लिए होते हैं। इस पर ध्यान रखते हुए, मिंकॉव्स्की स्पेसटाइम में शुद्ध स्थानिक रोटेशन निम्नलिखित संबंधों द्वारा वर्णित हैं:
xy विमान के संबंध में रोटेशन: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
yz विमान के संबंध में रोटेशन: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
xz विमान के संबंध में रोटेशन: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
इन ट्रांसफॉर्मेशन की वही गुणधर्म होते हैं जो उनकी तीन-आयामी समकक्ष होती हैं।
स्पेसटाइम के हाइपरबोलिक रोटेशन
वेग पैरामीटर का परिचय
लॉरेंज़ ट्रांसफॉर्मेशन और स्थानिक रोटेशन के बीच की समानता को हम वेग पैरामीटर को पेश करते हुए प्राप्त कर सकते हैं।
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
क्योंकि \beta_{ss^\prime_x}\in]-1,1[, हम पाते हैं कि \psi_{ss^\prime_x}\in\mathbb{R}। साथ ही, नोट करें कि इससे हम पाते हैं कि \gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x}) और \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x})। यह निम्नलिखित गणनाओं से प्राप्त होता है:
यह स्पष्ट है कि \psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}) का अर्थ है \beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x}); और इसलिए:
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
जैसा कि गामा फैक्टर और हाइपरबोलिक कोसेन दोनों हमेशा 1 या उससे अधिक होते हैं, यह अंततः साबित होता है कि \gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x})।
इसी तरह, उपरोक्त गणनाओं को जारी रखते हुए, हम पाते हैं:
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
और इसलिए \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x})।
हाइपरबोलिक रोटेशन के रूप में स्पेसटाइम रोटेशन को सूत्रबद्ध करना
अब, हम लॉरेंज़ ट्रांसफॉर्मेशन में वेग पैरामीटर का उपयोग करके गति बूस्ट और गामा फैक्टर को पुनःलिख सकते हैं। दो जड़त्वीय प्रणालियों S और S^\prime को मानते हुए, जहाँ दूसरे प्रणाली को x अक्ष पर \beta_{ss^\prime_x} वेग बूस्ट लागू होता है, हम पाते हैं:
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
इस समीकरण प्रणाली को निम्नलिखित मैट्रिक्स स्वरूप में प्रस्तुत किया जा सकता है:
स्पेसटाइम के हाइपरबोलिक रोटेशन tx विमान पर:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
इसी तरह, हमारे पास प्रत्येक स्पेसटाइम विमान पर हाइपरबोलिक रोटेशन होते हैं:
स्पेसटाइम के हाइपरबोलिक रोटेशन ty विमान पर:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
स्पेसटाइम के हाइपरबोलिक रोटेशन tz विमान पर:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
उनके स्वरूप और गुणधर्मों के कारण, ये ट्रांसफॉर्मेशन स्थानिक रोटेशन के समान हैं, केवल वे त्रिकोणमितीय कार्यों के बजाय हाइपरबोलिक कार्यों का उपयोग करते हैं। हालांकि ये सख्त अर्थ में रोटेशन नहीं हैं, ये पहले समीक्षा की गई रोटेशन के साथ कुछ समानताएं साझा करते हैं। उदाहरण के लिए, जैसे रोटेशन के मामले में होता है, विपरीत ट्रांसफॉर्मेशन प्राप्त करने के लिए संबंधित वेग पैरामीटर \psi को -\psi से प्रतिस्थापित किया जाता है। इन ट्रांसफॉर्मेशन को कभी-कभी हाइपरबोलिक रोटेशन कहा जाता है, और वेग पैरामीटर को हाइपरबोलिक कोण भी कहा जाता है।
निष्कर्ष
अब तक हमने मिंकॉव्स्की स्पेसटाइम में रोटेशन के अवधारणा को गहराई से समझा है, जिससे हमें लॉरेंज़ ट्रांसफॉर्मेशन की बेहतर समझ मिलती है। इस अध्ययन के माध्यम से, हमने निम्नलिखित प्रमुख बिंदु हासिल किए हैं:
- लॉरेंज़ ट्रांसफॉर्मेशन की पुनःव्याख्या: हमने लॉरेंज़ ट्रांसफॉर्मेशन को केवल विभिन्न संदर्भ फ्रेमों के कारण कॉर्डिनेट्स में परिवर्तन के रूप में नहीं, बल्कि स्पेसटाइम रोटेशन के रूप में भी देखने और समझने की कला सीखी है।
- मिंकॉव्स्की स्पेसटाइम में रोटेशन की समझ: हमने मिंकॉव्स्की के चार-आयामी स्थान के भीतर रोटेशन का विस्तृत अध्ययन किया है।
- स्पेसटाइम के हाइपरबोलिक रोटेशन की खोज: अंततः, हमने स्पेसटाइम के हाइपरबोलिक रोटेशन के अवधारणा को प्रस्तुत किया, और इसकी समानताएं स्थानिक रोटेशन के साथ जांची।