
गतिकी की मूलभूत बातें: स्थिति, वेग, और त्वरण
सारांश:
इस कक्षा में हम गतिकी के मूलभूत अवधारणाओं की समीक्षा करेंगे: स्थिति, वेग और त्वरण। हम समय के साथ स्थिति का प्रतिनिधित्व कैसे करें, इस पर विचार करेंगे, साथ ही तात्कालिक और औसत वेग और त्वरण के बीच अंतर करेंगे। इसके अलावा, हम स्थिर त्वरण के साथ गति की समीकरणों को निष्कर्षित करेंगे, जो किसी वस्तु की स्थिति और वेग की भविष्यवाणी करने के लिए आवश्यक हैं।
सीखने के उद्देश्य:
कक्षा के अंत में, छात्र सक्षम होंगे:
- याद करें गतिकी में स्थिति, वेग, और त्वरण की मूल परिभाषाएं।
- विश्लेषण करें त्वरण, वेग और स्थिति के बीच के संबंध।
- लागू करें त्वरण से वेग और स्थिति की गणना करने के लिए अवकलज और समाकलन का उपयोग, और इसके विपरीत।
- समझें तात्कालिक और औसत वेग के बीच का अंतर, और तात्कालिक और औसत त्वरण के बीच का अंतर।
सामग्री की सूचकांक
परिचय
स्थिति, स्थान और प्रेक्षक
वेग और तीव्रता
त्वरण
गति की समीकरणें
निष्कर्ष
परिचय
त्वरण से, समय के सापेक्ष समाकलन द्वारा वेग और स्थिति की गणना करना संभव है, और स्थिति से, समय के सापेक्ष अवकलन द्वारा वेग और त्वरण की गणना करना संभव है। ये शब्द गतिकी के बारे में हमारे अध्ययन को संक्षेप में प्रस्तुत करते हैं, और हमारे मुख्य उद्देश्यों में से एक इन शब्दों के अर्थ को समझना होगा। गति परिवर्तन का एक रूप दर्शाती है, और प्रकृति में सब कुछ परिवर्तन के अधीन है। इसलिए, परिवर्तन और इसके विभिन्न प्रकारों का अध्ययन भौतिकी के मुख्य आधारों में से एक है।
परिवर्तनशीलता के कई प्रकार हैं: नया पुराना हो जाता है, कोई व्यक्ति एक पेशा से दूसरे में बदल सकता है, स्वस्थ से बीमार और इसके विपरीत, और दिन रात में बदल जाता है, आदि। ये सभी परिवर्तन के उदाहरण हैं, लेकिन गतिकी का अध्ययन करते समय, हम विशेष रूप से एक परिवर्तन पर ध्यान केंद्रित करेंगे: स्थिति का परिवर्तन या गति। गति के अध्ययन में, हम दो पूरक दृष्टिकोणों की सराहना कर सकते हैं: एक उस कारण पर आधारित है जो इसे उत्पन्न करता है और दूसरा जिस तरह से यह विकसित होता है, जिससे गतिकी और गति उत्पन्न होती हैं, जो मिलकर यांत्रिकी बनाती हैं।
भौतिकी में, हम स्थिति, वेग, और त्वरण जैसे अवधारणाओं के गणितीय प्रतिनिधित्व को सरल बनाने के लिए भौतिक स्थान को एक सदिश स्थान के रूप में मॉडल करते हैं। सामान्यतः, हम इस उद्देश्य के लिए त्रि-आयामी स्थान \mathbb{R}^3 का उपयोग करते हैं, हालांकि सिद्धांत में, किसी भी आयाम के स्थान संदर्भ के अनुसार उपयुक्त हो सकते हैं।
स्थिति, स्थान और प्रेक्षक
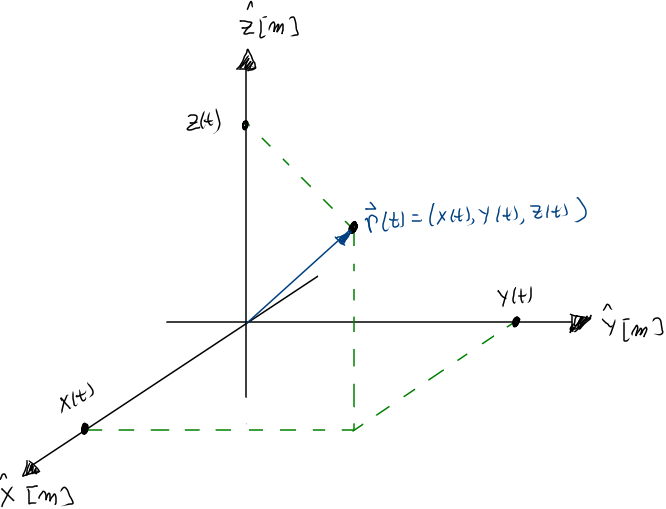
मान लें कि हमारे पास एक फलन है
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
यह एक फलन है जो हर t\in\mathbb{R} के लिए एक स्थिति \vec{r}(t) निर्धारित करता है, और इसलिए, हम कहते हैं कि यह एक स्थिति फलन है (या बस स्थिति)। स्वतंत्र चर t को “समय” कहा जाता है, और पैरामीटर n स्थान के “आयाम” का प्रतिनिधित्व करता है। प्रतीक [T] और [L] समय और लंबाई के भौतिक आयामों को संदर्भित करते हैं, जो आमतौर पर “सेकंड” और “मीटर” में मापी जाती हैं।
स्थिति, किसी भी भौतिक राशि की तरह, एक प्रेक्षक द्वारा मापी जाती है। स्थिति के मेरे द्वारा दिए गए विवरण में, मैंने यह समझ लिया है कि प्रेक्षक के पास शून्य सदिश की निर्देशांक हैं, \vec{0}। यदि प्रेक्षक \mathcal{O} के पास सदिश \vec{r} की निर्देशांक हैं और बिंदु वस्तु की निर्देशांक \vec{r}^\prime हैं, तो प्रेक्षक के सापेक्ष स्थिति होगी:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
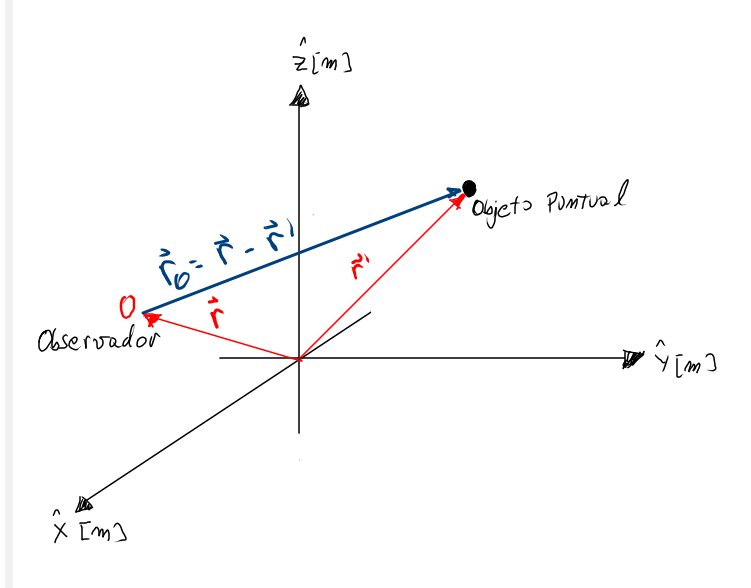
स्थान सभी संभावित स्थितियों का सेट है, यह किसी भी प्रेक्षक के सापेक्ष सभी संभावित स्थितियों का भी सेट है। स्थिति समय का एक फलन है और इसका उपयोग गणितीय रूप से “बिंदु वस्तु” कहलाने वाली आदर्श वस्तु का हर समय t में स्थित होने वाले स्थान का प्रतिनिधित्व करने के लिए किया जाता है। बिंदु वस्तु एक आदर्शीकरण है, यह वह है जो एक वास्तविक वस्तु से तब बचता है जब हम उसे सभी गुणों से मुक्त कर देते हैं, आकार और रूप सहित, केवल “स्थान जो वह स्थान पर लेता है” को बनाए रखते हुए।
स्थिति आमतौर पर एक सदिश होती है। सदिशों में दो तत्व होते हैं: परिमाण और दिशा। प्रेक्षक के सापेक्ष स्थिति का परिमाण प्रेक्षक से दूरी होती है और इसे dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\| द्वारा दिया जाता है।
इस बिंदु से, अवकलन और समाकलन के पाठ्यक्रम की सामग्री में महारत हासिल करना अत्यधिक अनुशंसित है।
तीव्रता और वेग
यदि स्थिति समय के सापेक्ष अवकलनीय है, तो प्रेक्षक \mathcal{O} के सापेक्ष वेग \vec{v}_\mathcal{O}(t) निम्नलिखित रूप में परिभाषित किया जा सकता है:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
सरल शब्दों में: वेग स्थिति का समय के साथ अवकलज है और यह हमें बताता है कि स्थिति प्रत्येक क्षण t में कैसे बदलती है।
वेग के दो प्रकार होते हैं: तात्कालिक और औसत। तात्कालिक वेग अभी प्रस्तुत किया गया था, औसत वेग सीमा की गणना छोड़कर प्राप्त किया जाता है। समयांतराल \Delta t की लंबाई पर औसत वेग \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> निम्नलिखित रूप में परिभाषित किया जाता है:
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
जहां \overline{t} किसी भी क्षण में [t,t+\Delta t] में निहित होता है।
तात्कालिक या औसत वेग से तीव्रता को उसकी संबंधित परिमाण के रूप में परिभाषित किया जाता है। प्रेक्षक \mathcal{O} के सापेक्ष तीव्रता v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\| होती है, और औसत तीव्रता \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\| होती है।
तीव्रता और वेग लंबाई के इकाईयों पर समय के इकाईयों में मापी जाती हैं, [L/T], जो आमतौर पर “मीटर प्रति सेकंड” होती हैं।
त्वरण
वेग के समान, अगर यह समय के सापेक्ष अवकलनीय है, तो प्रेक्षक \mathcal{O} के सापेक्ष त्वरण \vec{a}_\mathcal{O}(t) निम्नलिखित रूप में परिभाषित किया जा सकता है:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
त्वरण वेग का समय के साथ अवकलज है और परिणामस्वरूप यह हमें बताता है कि वेग समय के साथ कैसे बदलता है।
तीव्रता के समान, तात्कालिक और औसत त्वरण भी होते हैं। तात्कालिक त्वरण जो हमने अभी समीक्षा किया है, औसत त्वरण सीमा की गणना छोड़कर प्राप्त किया जाता है। समयांतराल \Delta t की लंबाई पर औसत त्वरण \left<\vec{a}_{\mathcal{O},\Delta t}\right> निम्नलिखित रूप में परिभाषित किया जाता है:
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
त्वरण लंबाई पर समय के वर्ग के इकाईयों में मापा जाता है, [L/T^2], जो आमतौर पर “मीटर प्रति सेकंड वर्ग” होती हैं।
गति की समीकरणें
मान लें कि हमारे पास एक बिंदु वस्तु है जो प्रेक्षक \mathcal{O} के सापेक्ष स्थिर त्वरण \vec{a}_\mathcal{O}(t) = \vec{a}_0 के साथ चल रही है। यदि स्थिति से वेग और त्वरण का अवकलज प्राप्त करना संभव है, तो त्वरण से वेग और स्थिति का समाकलन करके प्राप्त किया जा सकता है। इस तरह से प्राप्त परिणामों को गति की समीकरणें कहा जाता है।
इंटिग्रेटिंग \vec{a}_\mathcal{O}(t) = \vec{a}_0, हम पाते हैं:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
और फिर से समाकलन करके, हम पाते हैं:
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
यहां, \vec{v}_0 और \vec{r}_0 स्थिरांक, स्थिति और वेग के समाकलन स्थिरांक हैं, जो प्रेक्षक \mathcal{O} के सापेक्ष वस्तु की प्रारंभिक स्थिति और वेग का प्रतिनिधित्व करती हैं। संक्षेप में, गति की समीकरणें हैं:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
इन समीकरणों के माध्यम से, किसी भी वस्तु के स्थिर त्वरण के साथ चलने वाली गति का पूर्ण रूप से वर्णन करना संभव है। यह स्थापित करता है कि त्वरण से वेग और स्थिति का समाकलन करके प्राप्त किया जा सकता है, और स्थिति से वेग और त्वरण का अवकलज करके प्राप्त किया जा सकता है।
ध्यान दें कि ये सदिश समीकरणें हैं, और इसलिए, उन्हें उनके घटकों में विभाजित किया जा सकता है। यदि हम एक त्रि-आयामी स्थान में गति का मॉडल कर रहे हैं, तो हमें प्रत्येक अक्ष के लिए निम्नलिखित समीकरणें मिलती हैं:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
इस प्रकार, 9 समीकरणों का सेट बनता है, एक प्रत्येक अक्ष के लिए। उदाहरण के लिए, \hat{x} अक्ष के लिए, हमारे पास होगा:
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
आमतौर पर, \hat{z} निर्देशांक ऊंचाई के लिए आरक्षित की जाती है, इसलिए यह माना जाता है कि a_{0z}=-g \approx -9.81[m/s^2]; अर्थात, इस अक्ष में त्वरण को पृथ्वी के गुरुत्वाकर्षण द्वारा उत्पन्न त्वरण से जोड़ा जाता है। यह समीकरणों में शामिल किया जाता है ताकि मुक्त गिरावट या प्रक्षेप्य के प्रक्षेपण जैसे घटनाओं का मॉडलिंग किया जा सके।
निष्कर्ष
इस गतिकी की मूलभूत यात्रा में, हमने यह देखा कि गणित का उपयोग करके हम भौतिक स्थान में गति का वर्णन और समझ कर सकते हैं। स्थिति का एक सदिश के रूप में प्रतिनिधित्व करने से लेकर समयांतराल के समाकलन और अवकलन तक, हमने यह देखा कि ये अवधारणाएं कैसे जुड़े हुए हैं और गति के विश्लेषण में लागू होती हैं।
गतिकी, जो बिना गति के कारणों पर विचार किए गति का अध्ययन करती है, हमें वस्तुओं की शुद्ध और गणितीय रूप से सुंदर दृष्टिकोण प्रदान करती है। अवकलन और समाकलन की तकनीकों का उपयोग करके, हम गति के पैटर्न को समझ सकते हैं और भविष्य की दिशाओं की भविष्यवाणी कर सकते हैं, जो भौतिकी और अभियांत्रिकी के कई क्षेत्रों में आवश्यक है।
अंत में, हमारे समीकरणों में गुरुत्वाकर्षण के कारण त्वरण को शामिल करना हमें अधिक ठोस अनुप्रयोगों की ओर ले जाएगा, जैसे मुक्त गिरावट और प्रक्षेप्य के प्रक्षेपण। इस प्रकार, गतिकी का अध्ययन केवल एक सैद्धांतिक अभ्यास नहीं है, बल्कि यह भौतिक दुनिया को समझने और उसे संचालित करने का एक मौलिक उपकरण है।