
Rotations Hyperboliques de l’Espace-Temps
Résumé:
Dans ce cours, nous examinerons comment les transformations de Lorentz peuvent être réinterprétées comme des transformations de rotations de l’espace-temps. Nous commencerons par examiner les rotations dans l’espace de Minkowski à quatre dimensions, en distinguant les rotations purement spatiales de celles impliquant des axes espace-temps.
OBJECTIFS D’APPRENTISSAGE:
À la fin de ce cours, l’étudiant sera capable de:
- Comprendre les transformations de rotation dans l’espace-temps de Minkowski.
- Comprendre les transformations de Lorentz comme des rotations espace-temps.
INDEX
Introduction
Rotations dans l’Espace-Temps de Minkowski
Rotations spatiales pures
Généralisation Matricielle pour les Rotations Tridimensionnelles
Rotations Spatiales pour des Événements avec des Coordonnées Espace-Temps
Rotations hyperboliques de l’espace-temps
Introduction du paramètre de vitesse
Formuler les Rotations Espace-Temps comme des Rotations Hyperboliques
Conclusions
Introduction
Jusqu’à présent, nous avons examiné en détail la façon dont se produisent les transformations de Lorentz, c’est-à-dire la manière dont les coordonnées dans l’espace-temps de Minkowski d’un événement spécifique se modifient lorsqu’elles sont observées depuis différents référentiels inertiels. Ce que nous allons faire ensuite est d’examiner une perspective différente pour ces développements, en les visualisant comme des transformations de rotations de l’espace-temps. Nous découvrirons bientôt que cette approche offre des avantages au niveau algébrique, simplifiant en général les calculs, notamment lorsqu’il s’agit de combiner plusieurs transformations de Lorentz consécutives.
Rotations dans l’Espace-Temps de Minkowski
Commençons par analyser comment se produisent les différentes rotations spatiales dans l’espace-temps de Minkowski. Étant donné qu’il s’agit d’un espace à quatre dimensions, la manière la plus pratique d’établir une rotation est de le faire par rapport à un plan spécifique. Ainsi, nous pouvons définir des rotations sur les plans xy, xz et yz, ainsi que sur les plans xt, yt et zt. Les rotations effectuées dans les plans formés par des axes spatiaux sont des rotations purement spatiales, tandis que celles réalisées dans des plans composés d’axes espace et temps sont des rotations espace-temps. Pour l’instant, nous nous concentrerons sur la compréhension des rotations spatiales pures avant d’élargir cette connaissance aux rotations espace-temps.
Rotations spatiales pures
Commençons notre étude des rotations spatiales en examinant comment se réalisent les rotations dans le plan xy. Pour cela, supposons que nous avons un point avec des coordonnées (a,b) par rapport au système défini par les axes \hat{x} et \hat{y}. Ensuite, analysons la relation qui relie ces coordonnées à celles qu’observerait un système de référence roté. Ce système est défini par les axes \hat{x}^\prime et \hat{y}^\prime, qui sont rotés d’un angle \theta par rapport au système original, comme le montre la figure suivante:

Pour obtenir les relations entre les coordonnées (a,b) et (a^\prime,b^\prime) mesurées depuis chaque système, nous pouvons utiliser les lignes de guide suivantes:
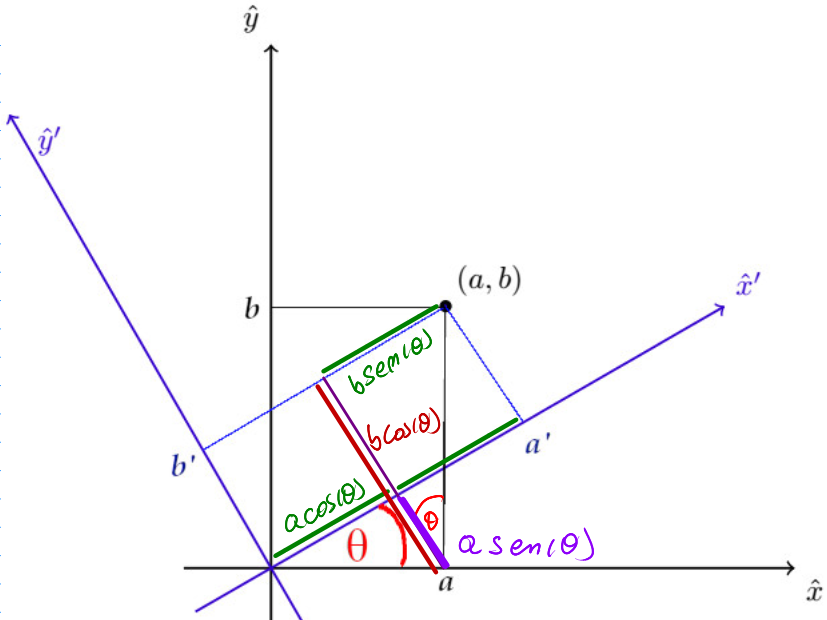
Ainsi, il est maintenant facile d’obtenir les équations de transformation
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
Généralisation Matricielle pour les Rotations Tridimensionnelles
Ce système d’équations peut être représenté de manière plus pratique sous sa forme matricielle.
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
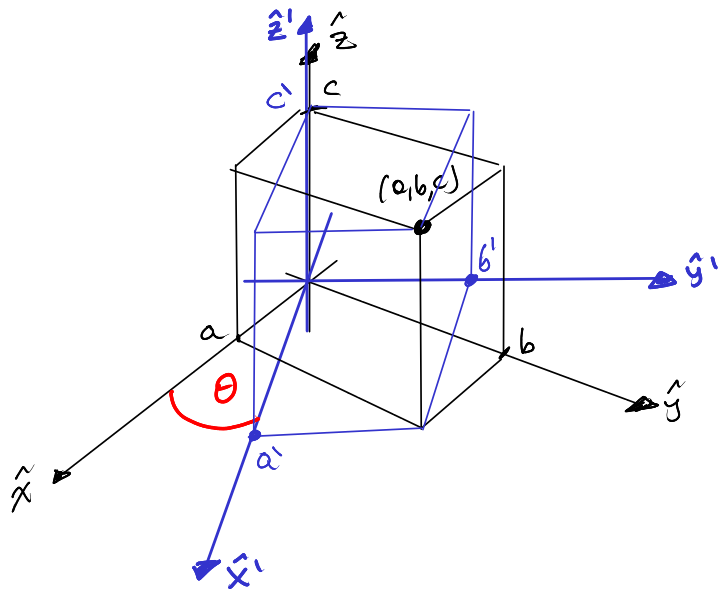
C’est pratique, car à partir de là, il est facile de généraliser pour des dimensions plus grandes. Par exemple, un point avec des coordonnées (a,b,c) dans le système formé par les axes \hat{x}, \hat{y} et \hat{z}, observé depuis un autre système formé par les axes \hat{x}^\prime, \hat{y}^\prime et \hat{z}^\prime, qui se distingue du système original par une rotation d’un angle \theta par rapport au plan \hat{x}\hat{y}, serait:
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
À partir de cela, nous obtenons les différentes matrices de transformation de rotations pour chacun des plans spatiaux.
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{Rotation d'un angle }\theta\\ \text{sur le plan }xy \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotation d'un angle }\theta\\ \text{sur le plan }yz \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotation d'un angle }\theta\\ \text{sur le plan }xz \end{array} \end{array}
Pour calculer la transformation inverse de ces transformations de rotation, il suffit de remplacer \theta par -\theta.
Rotations Spatiales pour des Événements avec des Coordonnées Espace-Temps
De même que nous avons généralisé de deux à trois dimensions, nous pouvons étendre cela à quatre dimensions. Pour rester cohérent avec le langage de la relativité spéciale, il est important de comprendre la signification de chaque coordonnée. Généralement, les coordonnées espace-temps sont exprimées de la manière suivante:
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
Ici, les exposants ne désignent pas des puissances, mais indiquent les caractéristiques de chaque coordonnée. La coordonnée avec un exposant 0 représente la dimension temporelle, tandis que les coordonnées avec des exposants 1, 2 et 3 correspondent aux dimensions spatiales. Cela étant dit, les rotations purement spatiales dans l’espace-temps de Minkowski se décrivent par les relations suivantes:
Rotation par rapport au plan xy: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotation par rapport au plan yz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotation par rapport au plan xz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Ces transformations conservent exactement les mêmes propriétés que leurs homologues en trois dimensions.
Rotations hyperboliques de l’espace-temps
Introduction du paramètre de vitesse
La similarité entre les transformations de Lorentz et une rotation spatiale peut être obtenue en introduisant ce que nous appelons paramètre de vitesse
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
Étant donné que \beta_{ss^\prime_x}\in]-1,1[, on a \psi_{ss^\prime_x}\in\mathbb{R}. De plus, notons qu’à partir de cela on aura que \gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x}) et \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}). Cela s’obtient à partir des calculs suivants:
Il est clair que \psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}) équivaut à dire \beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x}); et donc:
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
Comme le facteur gamma et le cosinus hyperbolique sont toujours supérieurs ou égaux à 1, il est finalement démontré que \gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x}).
De manière similaire en continuant les calculs précédents, on a:
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
Et donc \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}).
Formuler les Rotations Espace-Temps comme des Rotations Hyperboliques
À ce stade, nous pouvons maintenant réécrire le facteur associé au boost de vitesse et le facteur gamma en utilisant le paramètre de vitesse dans les transformations de Lorentz. En considérant deux systèmes inertiels S et S^\prime en configuration standard, où au second est appliqué un boost sur l’axe x, \beta_{ss^\prime_x}, on a:
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
Ce système d’équations admet la représentation matricielle suivante:
Rotation Hyperbolique de l’Espace-Temps sur le Plan tx:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
De manière analogue, nous avons des rotations hyperboliques sur chacun des plans espace-temps:
Rotation Hyperbolique de l’Espace-Temps sur le Plan ty:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Rotation Hyperbolique de l’Espace-Temps sur le Plan tz:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Par leur forme et leurs propriétés algébriques, ces transformations sont très similaires à une rotation spatiale, sauf qu’au lieu d’utiliser des fonctions trigonométriques, elles utilisent des fonctions hyperboliques. Bien qu’elles ne soient pas des rotations au sens strict, elles maintiennent une certaine analogie avec les rotations examinées au début. Par exemple, de manière similaire à ce qui se passe avec les rotations, la transformation inverse s’obtient en remplaçant le paramètre de vitesse correspondant \psi par -\psi. Ces transformations sont parfois appelées rotations hyperboliques, et le paramètre de vitesse est également connu sous le nom d’angle hyperbolique.
Conclusions
Jusqu’à présent, nous avons abordé de manière exhaustive le concept des rotations dans l’espace-temps de Minkowski, ce qui nous permet d’avoir une compréhension plus approfondie des transformations de Lorentz. À travers cette étude, nous avons atteint les points clés suivants:
- Réinterprétation des Transformations de Lorentz: Nous avons appris à visualiser et à comprendre les transformations de Lorentz non seulement comme des changements de coordonnées dus à différents référentiels, mais aussi comme des rotations dans l’espace-temps.
- Compréhension des Rotations dans l’Espace-Temps de Minkowski: Nous avons examiné en détail les rotations dans l’espace à quatre dimensions de Minkowski.
- Exploration des Rotations Hyperboliques de l’Espace-Temps: Enfin, nous avons introduit le concept de rotations hyperboliques de l’espace-temps, en examinant leurs similitudes avec les rotations spatiales habituelles.