
Les Fondements de la Cinématique : Position, Vitesse et Accélération
Résumé :
Dans ce cours, nous examinerons les concepts fondamentaux de la cinématique : position, vitesse et accélération. Nous explorerons comment représenter la position en fonction du temps, en différenciant entre la vitesse et l’accélération instantanées et moyennes. De plus, nous déduirons les équations du mouvement avec une accélération constante, essentielles pour prédire la position et la vitesse d’un objet.
OBJECTIFS D’APPRENTISSAGE :
À la fin de ce cours, les étudiants seront capables de :
- Se rappeler les définitions de base de la position, de la vitesse et de l’accélération en cinématique.
- Analyser les relations entre accélération, vitesse et position.
- Appliquer les dérivées et les intégrales pour calculer la vitesse et la position à partir de l’accélération, et vice versa.
- Comprendre la différence entre vitesse instantanée et moyenne, et entre accélération instantanée et moyenne.
TABLE DES MATIÈRES
Introduction
Position, Espace et Observateurs
Vitesse et Rapidité
Accélération
Équations du Mouvement
Conclusion
Introduction
À partir de l’accélération, il est possible de calculer la vitesse et la position en intégrant par rapport au temps, et à partir de la position, nous pouvons calculer la vitesse et l’accélération en différenciant par rapport au temps. Ces mots résument ce que nous explorerons sur la cinématique, et l’un de nos principaux objectifs sera de comprendre la signification de ces termes. Le mouvement représente une forme de changement, et tout dans la nature est sujet à des changements. Par conséquent, l’étude du changement et de ses variations est l’un des piliers fondamentaux de la physique.
Il existe de nombreuses variables susceptibles de changer : le neuf devient vieux, on peut passer d’une profession à une autre, de sain à malade et vice versa, et du jour à la nuit, entre autres. Tous ces exemples sont des changements, mais en étudiant la cinématique, nous nous concentrerons sur un en particulier : le changement de position ou mouvement. Dans l’étude du mouvement, nous pouvons apprécier deux approches complémentaires : l’une basée sur les causes qui le produisent et l’autre sur la manière dont il se développe, donnant lieu à la Dynamique et à la Cinématique, qui ensemble forment la Mécanique.
En physique, nous modélisons l’espace physique comme un espace vectoriel pour faciliter la représentation mathématique de concepts tels que la position, la vitesse et l’accélération. Généralement, nous utilisons l’espace tridimensionnel \mathbb{R}^3 à cette fin, bien qu’en théorie, des espaces de n’importe quelle dimension puissent être adéquats selon le contexte.
Position, Espace et Observateurs
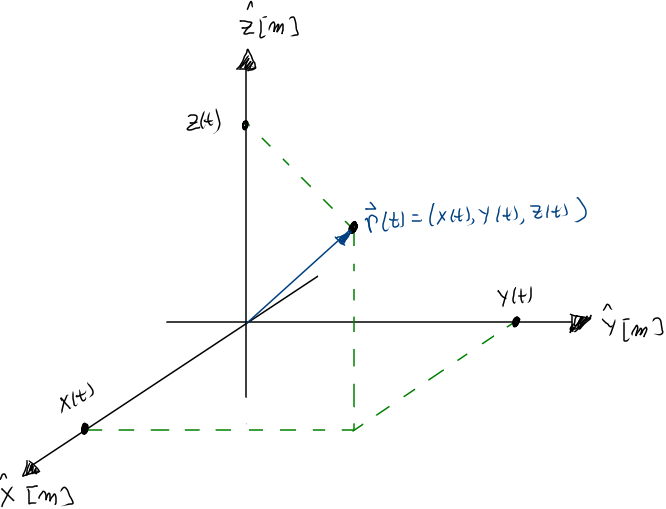
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Il s’agit d’une fonction qui associe une position \vec{r}(t) à chaque t\in\mathbb{R}, et par conséquent, nous disons qu’il s’agit d’une fonction de position (ou simplement position). La variable indépendante t est appelée « temps », et le paramètre n correspond à la « dimension » de l’espace. Les symboles [T] et [L] se réfèrent aux dimensions physiques de temps et de longueur, généralement mesurées en « secondes » et « mètres, » respectivement.
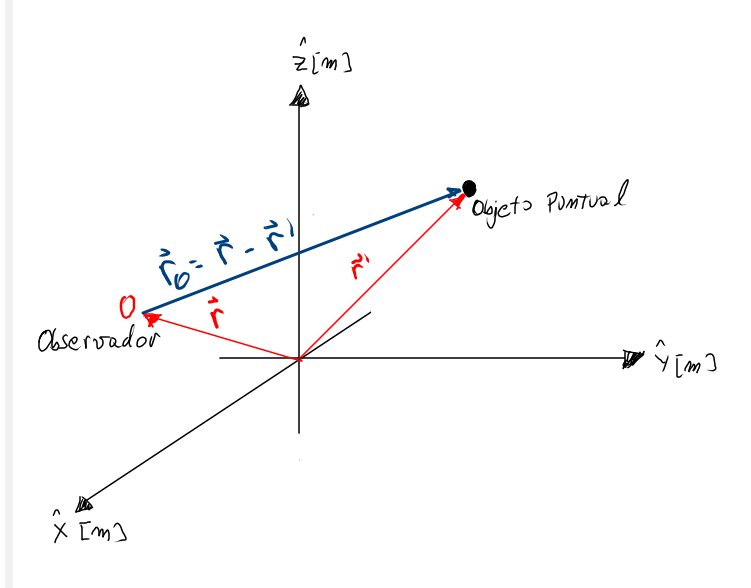
La position, comme toute grandeur physique, est mesurée par un observateur. Dans la description que j’ai donnée de la position, j’ai implicitement supposé que l’observateur a les coordonnées du vecteur nul, \vec{0}. Si l’observateur \mathcal{O} a les coordonnées du vecteur \vec{r} et que l’objet ponctuel a les coordonnées \vec{r}^\prime, alors la position relative à l’observateur sera :
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
L’espace est l’ensemble de toutes les positions possibles, c’est aussi l’ensemble de toutes les positions possibles relatives à n’importe quel observateur. La position est une fonction du temps et est utilisée pour représenter mathématiquement l’endroit où se trouve un objet idéal appelé « objet ponctuel » à chaque instant t. L’objet ponctuel est une idéalisation, c’est ce qui reste d’un objet réel lorsque nous le dépouillons de toutes ses qualités, y compris la taille et la forme, ne conservant que le « lieu qu’il occupe dans l’espace. »
La position est généralement un vecteur. Les vecteurs sont constitués de deux éléments : la magnitude et la direction. La magnitude de la position relative à un observateur est la distance à l’observateur et est donnée par dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|.
À partir de ce point, il est très recommandé de maîtriser les contenus du cours de calcul différentiel et intégral.
Vitesse et Rapidité
Si la position est différentiable par rapport au temps, il est alors possible de définir la vitesse relative à un observateur \mathcal{O}, \vec{v}_\mathcal{O}(t), de la manière suivante :
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
En termes simples : la vitesse est la dérivée temporelle de la position et nous indique comment la position change à chaque instant t.
Il existe deux types de vitesses : instantanée et moyenne. La vitesse instantanée est celle que nous venons de présenter, la vitesse moyenne est obtenue en omettant le calcul de la limite. La vitesse moyenne sur l’intervalle de temps de longueur \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, est définie comme
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
où \overline{t} est un instant quelconque contenu dans l’intervalle [t,t+\Delta t].
À partir de la vitesse (qu’elle soit instantanée ou moyenne) on définit la rapidité comme sa magnitude correspondante. La rapidité relative à un observateur \mathcal{O} est v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, et la rapidité moyenne \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
La rapidité et la vitesse sont mesurées en unités de longueur par unités de temps, [L/T], généralement en « mètres par seconde ».
Accélération
De manière similaire à la vitesse, si elle est différentiable par rapport au temps, il est alors possible de définir le concept d’accélération relative à un observateur \mathcal{O}, \vec{a}_\mathcal{O}(t), de la manière suivante :
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
L’accélération est la dérivée temporelle de la vitesse et par conséquent nous indique comment la vitesse change au fil du temps.
De manière similaire à la rapidité, il existe l’accélération instantanée et l’accélération moyenne. L’accélération instantanée est celle que nous venons de voir, l’accélération moyenne est obtenue en omettant le calcul de la limite. L’accélération moyenne sur l’intervalle de temps de longueur \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, est définie comme
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
L’accélération est mesurée en unités de longueur par temps au carré, [L/T^2], généralement en « mètres par seconde au carré ».
Équations du Mouvement
Supposons que nous ayons un objet ponctuel qui se déplace par rapport à un observateur \mathcal{O} avec une accélération constante \vec{a}_\mathcal{O}(t) = \vec{a}_0. S’il est possible de dériver la vitesse et l’accélération à partir de la position, alors à partir de l’accélération, il est possible de calculer la vitesse et la position en intégrant. Les résultats obtenus de cette manière sont connus sous le nom d’équations du mouvement.
En intégrant \vec{a}_\mathcal{O}(t) = \vec{a}_0 nous obtenons :
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
Et en intégrant de nouveau nous obtenons
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Ici, les constantes \vec{v}_0 et \vec{r}_0 sont des constantes d’intégration qui représentent la vitesse et la position initiales de l’objet ponctuel par rapport à l’observateur \mathcal{O}. En résumé, les équations du mouvement sont :
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
Grâce à ces équations, il est possible de décrire complètement le mouvement de n’importe quel objet ponctuel qui se déplace avec une accélération constante. Cela établit qu’à partir de l’accélération, il est possible de calculer la vitesse et la position en intégrant, et à partir de la position, il est possible de calculer la vitesse et l’accélération en dérivant.
Notez que ce sont des équations vectorielles, et par conséquent, elles peuvent être séparées en leurs composants. Si nous modélisons un mouvement dans un espace tridimensionnel, alors nous aurons chaque composant séparé de la manière suivante :
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Ainsi, nous créons un ensemble de 9 équations, une pour chaque axe de coordonnées. Par exemple, pour l’axe \hat{x}, nous aurons
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
Généralement, la coordonnée \hat{z} est réservée pour la hauteur, de sorte qu’on suppose que a_{0z}=-g \approx -9.81[m/s^2]; c’est-à-dire que l’accélération dans cet axe est associée à l’accélération produite par la gravité terrestre. Cela est inclus dans les équations pour modéliser des phénomènes tels que la chute libre ou le lancement d’un projectile.
Conclusion
Dans ce parcours des fondements de la cinématique, nous avons exploré comment utiliser les mathématiques pour décrire et comprendre le mouvement dans l’espace physique. De la représentation de la position comme un vecteur dans un espace de dimension arbitraire à la dérivation et l’intégration de fonctions vectorielles pour obtenir la vitesse, l’accélération et les équations du mouvement, nous avons vu comment ces concepts sont liés et appliqués dans l’analyse du mouvement.
La cinématique, en étudiant le mouvement sans considérer les causes qui le produisent, nous offre une perspective pure et mathématiquement élégante du mouvement des objets ponctuels. Avec les outils du calcul différentiel et intégral, nous pouvons démêler les schémas de mouvement et prédire les trajectoires futures, ce qui est essentiel dans de nombreux domaines de la physique et de l’ingénierie.
Enfin, l’inclusion de l’accélération due à la gravité dans nos équations nous mènera à des applications plus concrètes, telles que la chute libre et le lancement de projectiles, démontrant la pertinence et l’applicabilité de la cinématique dans notre monde quotidien. Par conséquent, l’étude de la cinématique n’est pas seulement un exercice théorique, mais un outil fondamental pour comprendre et manipuler le monde physique qui nous entoure.