
時空の双曲回転
要約:
本講義では、ローレンツ変換が時空回転変換として再解釈できる方法を検討する。まず、ミンコフスキーの四次元空間における回転を考察し、純粋に空間的な回転と時空軸を含む回転とを区別する。
学習目標:
本講義の終了時に学生は次のことができるようになる。
- 理解する ミンコフスキー時空における回転変換。
- 理解する ローレンツ変換を時空回転として捉えること。
目次
序論
ミンコフスキー時空における回転
純粋な空間回転
三次元回転の行列表現の一般化
時空座標を持つ事象に対する空間回転
時空の双曲回転
速度パラメータの導入
時空回転を双曲回転として定式化する
結論
序論
ここまで、我々はローレンツ変換がどのように行われるかを詳細に検討してきた。すなわち、特定の事象におけるミンコフスキー時空の座標が、異なる慣性基準系から観測された場合にどのように変化するかである。次に行うのは、これらの展開に対する別の視点を見直し、それらを時空回転変換として捉えることである。このアプローチは代数的な利点をもたらし、計算を一般的に単純化し、とりわけ複数の連続したローレンツ変換を組み合わせる際に有用であることが、まもなく明らかになる。
ミンコフスキー時空における回転
まず、ミンコフスキー時空において様々な空間回転がどのように行われるかを分析しよう。これは四次元空間であるため、回転を定める最も実用的な方法は特定の平面に関して行うことである。このようにして、xy、xz、yz 平面上の回転や、xt、yt、zt 平面上の回転を定義できる。空間軸で構成される平面における回転は純粋に空間的な回転であり、空間軸と時間軸で構成される平面における回転は時空回転である。ここではまず、純粋な空間回転を詳細に理解し、その後この知識を時空回転へ拡張していく。
純粋な空間回転
空間回転の研究を始めるにあたり、まず xy 平面における回転がどのように行われるかを考察する。ここで、\hat{x} 軸および \hat{y} 軸によって定義された系に対して、座標 (a,b) を持つ点を考える。次に、この座標が回転した基準系でどのように観測されるかを分析する。この基準系は \hat{x}^\prime 軸および \hat{y}^\prime 軸によって定義され、これらは元の系に対して角度 \theta だけ回転している。次の図に示す通りである。

座標 (a,b) と (a^\prime,b^\prime) の関係を各系から測定するためには、次のガイドラインを利用できる。
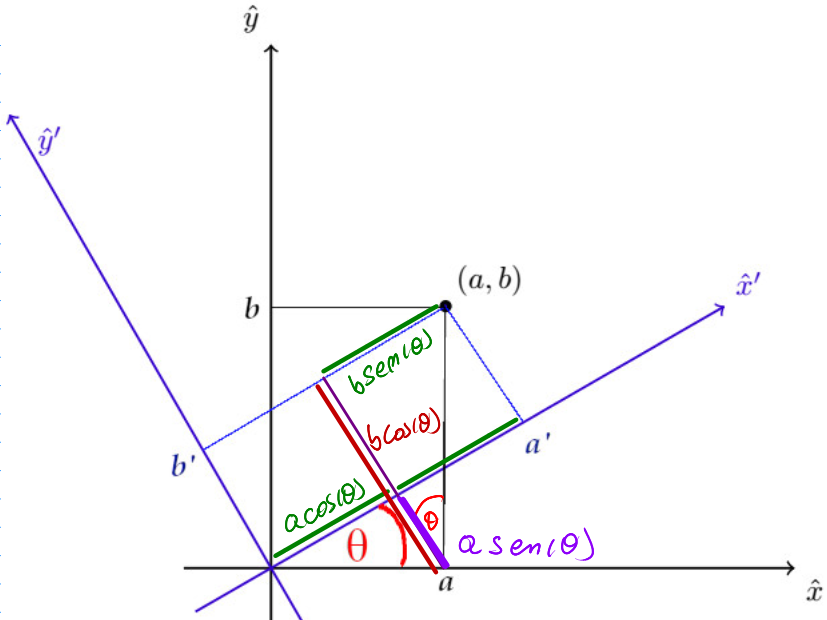
このようにして、変換方程式を容易に得ることができる。
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
三次元回転の行列表現の一般化
この連立方程式は、行列形式でより便利に表すことができる。
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
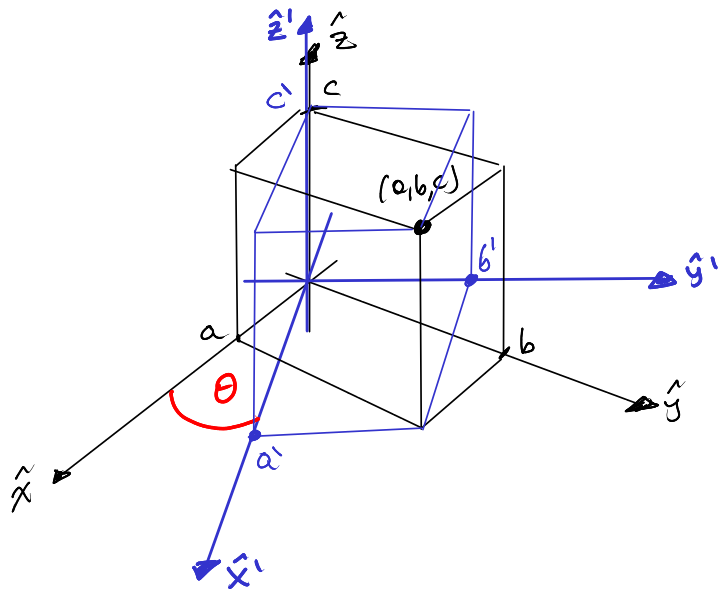
これは便利であり、ここからより高次元への一般化が容易になる。例えば、座標 (a,b,c) を持つ点が、軸 \hat{x}、\hat{y}、\hat{z} で定義される系に存在するとする。この点を、\hat{x}^\prime、\hat{y}^\prime、\hat{z}^\prime で定義される別の系から観測する。この新しい系は、平面 \hat{x}\hat{y} に関して角度 \theta だけ回転しており、次のように表される。
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
ここから、各空間平面に対するさまざまな回転変換行列を得ることができる。
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{角度 }\theta\text{ における回転}\\ xy\text{ 平面上} \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{角度 }\theta\text{ における回転}\\ yz\text{ 平面上} \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{角度 }\theta\text{ における回転}\\ xz\text{ 平面上} \end{array} \end{array}
これらの回転変換の逆変換を計算するには、\theta を -\theta に置き換えるだけでよい。
時空座標を持つ事象に対する空間回転
二次元から三次元へ一般化したのと同様に、これを四次元へ拡張することができる。特殊相対論の言語における整合性を保つためには、各座標の意味を理解することが重要である。一般的に、時空座標は次のように表される。
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
ここで、上付き添字はべき乗を意味するのではなく、それぞれの座標の性質を示している。上付き添字 0 の座標は時間次元を表し、上付き添字 1、2、3 の座標は空間次元に対応する。これを踏まえると、ミンコフスキー時空における純粋な空間回転は次の関係式で表される。
xy平面に関する回転: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
yz平面に関する回転: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
xz平面に関する回転: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
これらの変換は、三次元における対応する変換とまったく同じ性質を保持している。
時空の双曲回転
速度パラメータの導入
ローレンツ変換と空間回転との類似性は、いわゆる速度パラメータを導入することで得られる。
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
\beta_{ss^\prime_x}\in]-1,1[ であるため、\psi_{ss^\prime_x}\in\mathbb{R} となる。さらに、これにより \gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x}) および \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}) が成り立つ。これは次の計算から得られる。
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}) は \beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x}) と言うことと同値であり、したがって次が成り立つ。
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
ガンマ因子も双曲線余弦も常に1以上であるため、最終的に \gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x}) が示される。
同様に、先に行った計算を続けると次が得られる。
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
したがって \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}) となる。
時空回転を双曲回転として定式化する
ここまで到達したことで、ローレンツ変換において速度ブーストに関連する因子とガンマ因子を速度パラメータを用いて書き換えることができる。標準的な配置にある2つの慣性系 S と S^\prime を考え、後者に x 軸方向のブースト \beta_{ss^\prime_x} が加えられると次のようになる。
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
この連立方程式は次の行列表現を持つ。
tx平面における時空の双曲回転:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
同様に、各時空平面において双曲回転を得ることができる。
ty平面における時空の双曲回転:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
tz平面における時空の双曲回転:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
その形と代数的性質により、これらの変換は空間回転に非常によく似ている。ただし三角関数の代わりに双曲線関数を用いる点が異なる。厳密な意味での回転ではないものの、冒頭で扱った回転と一定の類似性を保持している。例えば、回転の場合と同様に、逆変換は対応する速度パラメータ \psi を -\psi に置き換えることで得られる。これらの変換はしばしば双曲回転と呼ばれ、速度パラメータは双曲角としても知られている。
結論
ここまで、ミンコフスキー時空における回転の概念を包括的に取り上げ、それによってローレンツ変換をより深く理解することができた。本研究を通じて、以下の重要な点が明らかになった。
- ローレンツ変換の再解釈: ローレンツ変換を、異なる基準系による座標の変化としてだけでなく、時空における回転としても捉え、理解する方法を学んだ。
- ミンコフスキー時空における回転の理解: ミンコフスキーの四次元空間における回転を詳細に検討した。
- 時空の双曲回転の探究: 最後に、時空の双曲回転という概念を導入し、それが通常の空間回転とどのように類似しているかを考察した。