
Законы Ньютона
Резюме:
Этот урок посвящен законам Ньютона и их роли в динамике тел. Изучается, как масса и скорость определяют линейный импульс, и описываются три закона: инерция, поддерживающая состояние движения при отсутствии внешних сил, связь между силой и ускорением, и действие и противодействие между телами. С помощью примеров, таких как скольжение на плоскостях и движение маятников, иллюстрируется применение этих законов, завершаясь практическими упражнениями для закрепления изученного материала.
Цели обучения:
По завершении этого урока студент будет способен:
- Понять три закона Ньютона и их применение в динамике тел.
- Применить законы Ньютона для анализа и решения задач по динамике.
- Определить связь между массой, скоростью и линейным импульсом.
- Анализировать важность инерциальных наблюдателей в изучении динамики.
- Объяснить, как второй закон Ньютона связывает силу и ускорение.
- Описать понятие инерционной массы и как сравнивать её между разными телами.
Оглавление
Введение
Законы Ньютона о динамике тел
Как использовать законы Ньютона?
Решение задач с использованием законов Ньютона
Введение
Если кинематика, которую мы рассмотрели в предыдущих уроках, позволяет нам описывать движение тел, то благодаря законам Ньютона мы получаем динамику, которая позволяет рассуждать о причинах движения (или изменениях состояния движения). Здесь понятия положения и времени важны, потому что через них мы определяем скорость и ускорение, но к ним добавляется ещё один фактор: масса.
Масса важна для определения состояния движения тел или линейного импульса. Считается, что линейный импульс тела, \vec{p}, является произведением массы на скорость.
\Large \vec{p}=m\vec{v}
Состояние движения — ключевая идея, лежащая в основе законов Ньютона.
Законы Ньютона о динамике тел
Первый закон (Закон инерции):
При отсутствии внешних сил все тела сохраняют свое состояние движения неизменным.
Первый закон Ньютона отличается гениальностью тем, что устанавливает два вопроса, имеющих глубокое значение для физики. Первый и наиболее очевидный: он устанавливает линейный импульс как сохраненную величину; второй, не менее важный, но гораздо более подразумеваемый, позволяет нам определить, что такое инерциальный наблюдатель.
Существует много способов определить наблюдателя, но среди всех них есть особый класс, который мы называем инерциальным наблюдателем. Разница заключается в том, что, с точки зрения инерциального наблюдателя, в отсутствие внешних сил состояние движения тел является консервативной величиной.
Что отличает инерциального наблюдателя от неинерциального?
Разница заключается в том, что, с точки зрения инерциального наблюдателя, в отсутствие внешних сил состояние движения тел является консервативной величиной.
Второй закон (Закон силы и массы):
С точки зрения инерциального наблюдателя сила, приложенная внешним агентом к телу, эквивалентна изменению его состояния движения.
Иными словами, если к телу приложена сила \vec{F}, то:
\Large \displaystyle \vec{F}=\frac{d\vec{p}}{dt}
Известное соотношение «сила равна произведению массы на ускорение», \vec{F}=m\vec{a}, это не что иное, как следствие второго закона Ньютона, которое получается из свойств производных и сохранения массы.
\begin{array}{rl} \vec{F} & =\displaystyle \frac{d\vec{p}}{dt} = \frac{d}{dt}\left(m\vec{v} \right) \\ \\ & =\displaystyle \underbrace{\frac{dm}{dt}}_{= 0}\vec{v} + m \underbrace{\frac{d\vec{v}}{dt}}_{= \vec{a}} = m\vec{a} \end{array}
На этом последнем шаге предполагалось, что dm/dt=0, поскольку считается, что масса не добавляется и не удаляется, а d\vec{v}/dt является определением ускорения.
Инерционная масса
Второй закон Ньютона также позволяет уточнить понятие массы. Здесь она фигурирует как постоянная пропорциональности между силой и ускорением. Чем больше масса, тем больше должна быть приложенная сила для достижения того же ускорения; в результате масса понимается как мера инерции тел, отсюда и название инерционной массы. Если на два тела, находящихся в относительном покое по отношению к инерциальному наблюдателю, действует одна и та же сила (без обмена материей), то:
m_1 \vec{a}_1 = \vec{F} = m_2 \vec{a}_2
Из этого мы можем сравнивать массы тел через отношение величин ускорений:
\displaystyle \frac{m_1}{m_2} = \frac{\|\vec{a_2}\|}{\|\vec{a_1}\|}
Таким образом, если m_2 является «эталонным килограммом», то достаточно наблюдать отношение \|\vec{a}_2\|/\|\vec{a}_1\|, чтобы узнать, сколько килограммов имеет m_1.
Третий закон (Закон действия и противодействия):
Если тело A оказывает силу «действие» на другое тело B, то B оказывает на A силу «противодействие» равной величины, но в противоположном направлении.
Третий закон Ньютона не только позволяет более точно говорить о силах, но и прямо указывает, что внешние агенты, прикладывающие силу, также являются физическими объектами, подверженными им:
- Внешний агент — это физический объект, подверженный воздействию сил.
- Силы никогда не существуют поодиночке, они всегда возникают парами, называемыми «пары действия и противодействия», и векторная сумма этих пар всегда равна нулю.
- Пары действия и противодействия всегда происходят на разных телах, так что суммарная сила на теле не обязательно равна нулю.
Поскольку пары действия и противодействия всегда действуют по прямой линии, это приводит к тому, что мы позже увидим, что это сохранение углового момента.
Кроме того, третий закон Ньютона подразумевает еще некоторые вещи:
- Для того чтобы на тело можно было приложить ненулевую силу, необходим как минимум еще один объект.
- Действие и противодействие происходят одновременно. Поскольку два тела могут взаимодействовать на расстоянии (посредством гравитации или электромагнетизма), в механике Ньютона должна существовать возможность передачи информации от одной точки к другой с бесконечной скоростью. Мы знаем, что это невозможно, поскольку, согласно специальной теории относительности, максимальная скорость — это скорость света в вакууме, поэтому мы говорим, что этот третий закон является приближением к реальности.
Как использовать законы Ньютона?
Для того чтобы понять, как используются законы Ньютона, чтобы их смысл был ясен, лучше всего обратиться к примерам на основе конкретных ситуаций и построения диаграмм свободного тела.
Диаграммы свободного тела
Диаграмма свободного тела — это схематическое изображение, на котором мы представляем силы, действующие на тело. В зависимости от того, что мы рассмотрели о весе, мы можем построить следующие примеры диаграмм свободного тела.
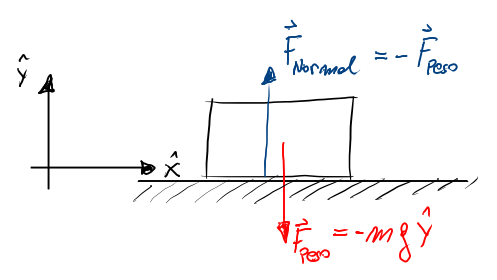
Тело, опирающееся на горизонтальную плоскость
Из-за гравитации все тела с массой ощущают силу, направленную к земле. С помощью второго закона Ньютона мы видим, что эта сила определяется произведением массы на ускорение гравитации \vec{g}=-g\hat{y}, где g=9.81[m/s^2].
\vec{F}_{вес}=m\vec{g} = -mg\hat{y}
То, что мы понимаем под «весом» тела, на самом деле — величина этой силы веса, которую мы только что рассмотрели.
{вес}=\|\vec{F}_{вес}\|= mg
Когда мы кладем блок на горизонтальную плоскость, возникает пара сил действия и противодействия: это сила веса и нормальная сила. Эти силы равны по величине, но противоположны по направлению, так что векторная сумма сил на теле равна нулю, и поэтому его состояние движения остается постоянным во времени.
Скольжение по горизонтальной плоскости
Представим, что теперь блок привязан к веревке, и мы тянем его, как показано на следующей диаграмме свободного тела:
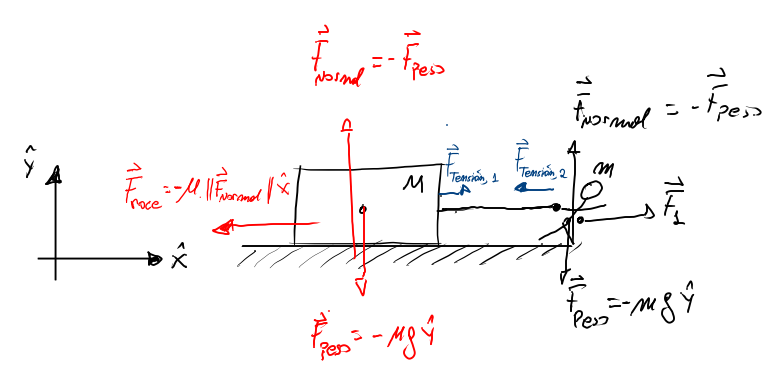
Здесь мы наблюдаем появление двух пар сил действия и противодействия: с одной стороны, у нас есть пары, связанные с силами веса и нормальными силами тел, есть третья пара действий-противодействий, связанные с концами веревки, которой человек тянет блок, и, наконец, пара, связанная с приложенной силой \vec{F}_1 и силой трения \vec{F}_{трение}, с максимальным значением \mu\|\vec{F}_\textnormal{нормальная}\|.
Коэффициент трения и силы трения
Здесь \mu — коэффициент трения, который выражает сопротивление скольжению между двумя поверхностями; коэффициент трения имеет две версии: кинетическую (\mu_c) и статическую (\mu_e). Статическое трение возникает, когда тело остается в покое, тогда как кинетическое возникает, как только тело начинает скользить.
\begin{array}{lcr}\mu = \left\{\begin{array}{lll} \mu_e & ;& \textnormal{Тело в покое} \\ \\ \mu_c & ;& \textnormal{Тело в движении} \end{array}\right. & ; & \textnormal{Где } \mu_c \leq \mu_e\end{array}
Сила трения противостоит движению тела, которое её испытывает, и может быть смоделирована (в упрощенной форме) следующим выражением:
\vec{F}_\textnormal{трение} ( \vec{F}_1 ) = \left\{ \begin{array}{lll} - \vec{F}_1 & ; & \|\vec{F}_1\| \leq \mu_e \|\vec{F}_\textnormal{нормальная}\| \\ \\ -\mu_c \|\vec{F}_\textnormal{нормальная}\|\hat{x} & ; & \mu_e \|\vec{F}_\textnormal{нормальная}\| \lt \|\vec{F}\| \end{array} \right.
Когда приложенная сила меньше или равна максимальному статическому трению, тело остается в относительном покое относительно земли. Если приложенная сила превышает статическое трение, тело начинает двигаться, и трение становится кинетическим, поэтому чистая сила на теле равна: \vec{F}_{чистая} = \vec{F}_1 - \mu_c\|\vec{F}_\textnormal{нормальная}\|\hat{x}, и, следовательно, движется с ускорением \vec{a} = \vec{F}_{чистая}/M. Если после того, как тело начало двигаться, приложенная сила становится равной кинетическому трению, то тело движется с постоянной скоростью.
Скольжение по наклонной плоскости
Когда объект скользит по наклонной плоскости под углом \alpha, мы получаем следующую диаграмму сил:
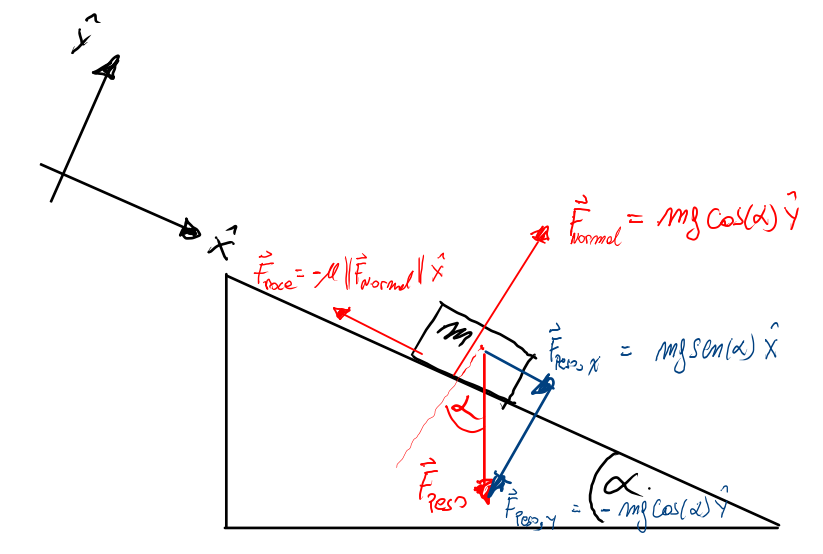
Здесь, для удобства, была выбрана система отсчета, ориентированная таким образом, что горизонтальная координата выровнена с плоскостью скольжения. На этой схеме сила веса делится на два компонента: один параллелен, а другой перпендикулярен движению.
- Параллельная составляющая: \vec{F}_{\textnormal{вес},x}=mg\sin(\alpha)\hat{x}
- Перпендикулярная составляющая: \vec{F}_{вес,y}=-mg\cos(\alpha)\hat{y}
Сила трения возникает как реакция на параллельную движению составляющую силы веса, а нормальная сила — как реакция на перпендикулярную составляющую силы веса. Если горизонтальная составляющая силы веса превышает максимальное статическое трение, то состояние движения блока изменится с ускорением:
\displaystyle \vec{a} = mg\left(\frac{\sin(\alpha) - \mu_c \cos(\alpha)}{m}\right)\hat{x}
Подвешенная масса
Масса, подвешенная на веревке, прикрепленной к потолку, и остающаяся в покое, имеет следующую диаграмму свободного тела:
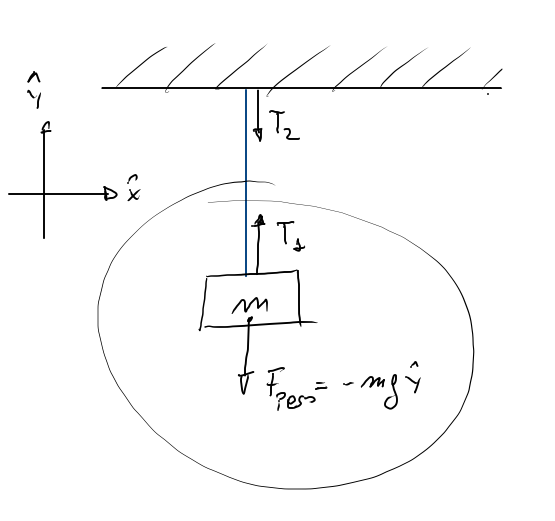
Масса, подвешенная на веревке, прикрепленной к потолку, и остающаяся в покое, имеет следующую диаграмму свободного тела:
На веревке существует пара сил, которые мы называем «натяжениями», если веревка нерастяжимая, эти силы равны и противоположны. На блок также действует пара сил: вес и натяжение веревки. Если блок остается висеть и находится в покое, то вес и натяжение противоположны и имеют одинаковую величину. Здесь существует четвертая сила, которая не показана, которая удерживает веревку, прикрепленную к потолку; эта группа из четырех сил формирует две пары действия и противодействия.
Движение простого маятника
Масса, прикрепленная к нерастяжимой веревке, и эта веревка прикреплена к потолку, которая колеблется вокруг положения равновесия из-за своего собственного веса — это то, что мы называем простым маятником. Ниже приведена его диаграмма свободного тела.
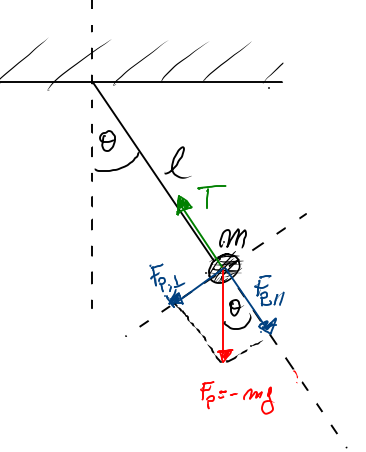
Поскольку веревка нерастяжима, ускорение по радиусу равно нулю, и, следовательно:
F_{p,\parallel} + T = ma_{\parallel}(t) = 0
С другой стороны, для составляющей перпендикулярной веревке будет:
F_{p,\bot}=-mg\sin(\theta) = ma_{\bot}(t)
Из этого последнего выражения можно вывести дифференциальное уравнение, которое позволит нам моделировать угловое положение \theta простого маятника со временем:
\displaystyle \frac{d^2\theta(t)}{dt^2} + \frac{g}{l}\sin(\theta) = 0
Но получение этого уравнения и выводы, которые можно сделать из него, мы рассмотрим более подробно позже.
Решение задач с использованием законов Ньютона
Используйте законы Ньютона для решения следующих задач:
- Блок массой 15[kg] помещен на горизонтальную поверхность. Между блоком и поверхностью имеется статическое трение \mu_e=0.55 и кинетическое трение \mu_c=0.31.
- Какова минимальная сила, необходимая для того, чтобы блок начал двигаться?
- Рассчитайте ускорение блока, когда он начинает двигаться под действием силы, полученной в предыдущем пункте.
- Блок массой 12[kg] помещен на наклоняемую плоскость. Если коэффициент статического трения равен \mu_e=0.03, определите максимальный угол наклона, при котором блок останется в покое.
- Блок массой 75[kg] поднимается с постоянной скоростью по наклонной плоскости под углом 30^o относительно горизонтали за счет силы, которая применяется горизонтально к нему. Если между блоком и поверхностью плоскости существует коэффициент кинетического трения \mu_c=0.21, определите величину этой приложенной силы.
- Рассмотрите две массы m_1 и m_2, соединенные нерастяжимой и безмассовой веревкой, которая проходит через шкив, как показано на рисунке. Рассчитайте ускорение обеих масс.

- Гибкая веревка массой M висит между двумя стенами, образуя угол \alpha в точках соединения. Рассчитайте натяжение веревки в самой нижней точке.
- Тело массой m вращается по кругу на плоскости x,y с радиусом R и постоянной угловой скоростью \omega. Рассчитайте приложенную к массе силу.

