
Rotação Hiperbólicas de Espaço-Tempo
Resumo:
Nesta aula, revisaremos como as transformações de Lorentz podem ser reinterpretadas como transformações de rotações de espaço-tempo. Começaremos examinando as rotações no espaço de quatro dimensões de Minkowski, distinguindo entre rotações puramente espaciais e aquelas que envolvem eixos espaço-temporais.
OBJETIVOS DE APRENDIZAGEM:
Ao finalizar esta aula o aluno será capaz de:
- Compreender as transformações de rotação no espaço-tempo de Minkowski.
- Compreender as transformações de Lorentz como rotações espaço-temporais.
ÍNDICE
Introdução
Rotações no Espaço-Tempo de Minkowski
Rotações espaciais puras
Generalização Matricial para Rotações Tridimensionais
Rotações Espaciais para Eventos com Coordenadas de Espaço-Tempo
Rotações hiperbólicas de espaço-tempo
Introduzindo o parâmetro de velocidade
Formulando as Rotações Espaço-Temporais como Rotações Hiperbólicas
Conclusões
Introdução
Até este ponto, examinamos detalhadamente a forma como são efetuadas as transformações de Lorentz, isto é, a maneira como as coordenadas no espaço-tempo de Minkowski de um evento específico se alteram quando são observadas de diferentes referenciais inerciais. O que faremos a seguir será revisar uma perspectiva diferente para estes desenvolvimentos, visualizando-as como transformações de rotações de espaço-tempo. Logo descobriremos que esta abordagem traz vantagens ao nível algébrico, que simplificam em geral os cálculos, especialmente ao combinar várias transformações de Lorentz consecutivas.
Rotações no Espaço-Tempo de Minkowski
Comecemos analisando como são efetuadas as diversas rotações espaciais no espaço-tempo de Minkowski. Dado que este é um espaço de quatro dimensões, o mais prático para estabelecer uma rotação é fazê-lo em relação a um plano específico. Desta forma, podemos definir rotações sobre os planos xy, xz e yz, assim como também sobre os planos xt, yt e zt. As rotações realizadas em planos formados por eixos espaciais são rotações puramente espaciais, enquanto que as realizadas em planos compostos por eixos de espaço e tempo são rotações espaço-temporais. Por ora, focaremos em entender em detalhe as rotações espaciais puras para depois ampliar este conhecimento às rotações espaço-temporais.
Rotações espaciais puras
Comecemos nosso estudo das rotações espaciais revisando como se realizam as rotações no plano xy. Para isso, suponhamos que temos um ponto com coordenadas (a,b) em relação ao sistema definido pelos eixos \hat{x} e \hat{y}. Em seguida, analisemos a relação que conecta estas coordenadas com as que observaria um sistema de referência rotado. Este sistema é definido pelos eixos \hat{x}^\prime e \hat{y}^\prime, que estão rotados um ângulo \theta em relação ao sistema original, como mostra a figura a seguir:

Para obter as relações entre as coordenadas (a,b) e (a^\prime,b^\prime) medidas de cada sistema, podemos utilizar as seguintes linhas guia:
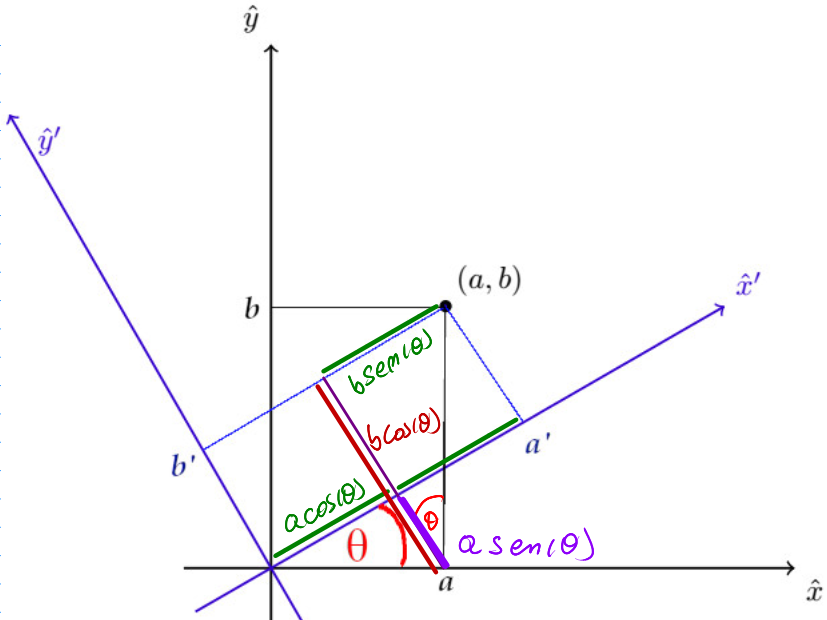
De modo que agora é simples obter as equações de transformação
\begin{array}{rcl} a^\prime & = & \phantom{-}a\cos(\theta) + b\sin(\theta) \\ b^\prime & = & -a \sin(\theta) + b \cos(\theta) \end{array}
Generalização Matricial para Rotações Tridimensionais
Este sistema de equações pode ser representado de maneira mais conveniente em sua forma matricial.
\left(\begin{array}{r} a^\prime \\ b^\prime \end{array}\right) = \left(\begin{array}{cc} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta)\end{array}\right) \left(\begin{array}{r} a \\ b \end{array}\right)
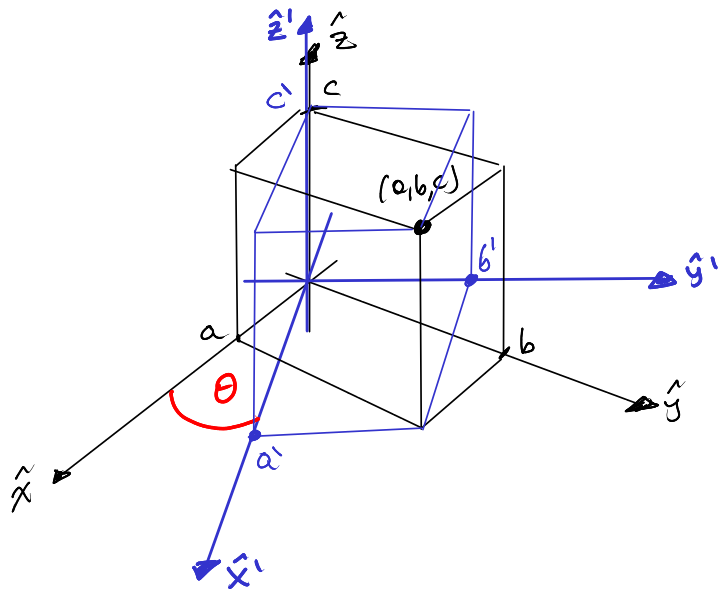
Isso é conveniente, pois a partir daqui é fácil generalizar para dimensões maiores. Por exemplo, um ponto com coordenadas (a,b,c) no sistema formado pelos eixos \hat{x}, \hat{y} e \hat{z}, observado de outro sistema formado pelos eixos \hat{x}^\prime, \hat{y}^\prime e \hat{z}^\prime, que se distingue do sistema original por uma rotação em um ângulo \theta em relação ao plano \hat{x}\hat{y}, seria:
\left(\begin{array}{r} a^\prime \\ b^\prime \\ c^\prime \end{array}\right) = \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) \left(\begin{array}{r} a \\ b \\ c\end{array}\right)
A partir disso, obtemos as diferentes matrizes de transformação de rotações para cada um dos planos espaciais.
\begin{array}{rll} R_{xy}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & \sin(\theta) & 0 \\ -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1\end{array}\right) & \begin{array}{l} \text{Rotação em um ângulo }\theta\\ \text{sobre o plano }xy \end{array} \\ \\ R_{yz}(\theta)= & \left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) \\ 0 & -\sin(\theta) & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotação em um ângulo }\theta\\ \text{sobre o plano }yz \end{array} \\ \\ R_{xz}(\theta)= & \left(\begin{array}{ccc} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta)\end{array}\right) & \begin{array}{l} \text{Rotação em um ângulo }\theta\\ \text{sobre o plano }xz \end{array} \end{array}
Para calcular a transformação inversa destas transformações de rotação, basta substituir \theta por -\theta.
Rotações Espaciais para Eventos com Coordenadas de Espaço-Tempo
De maneira similar a como generalizamos de duas a três dimensões, podemos estender isso a quatro dimensões. Para manter a coerência com a linguagem da relatividade especial, é importante entender o significado de cada coordenada. Geralmente, as coordenadas de espaço-tempo são expressas da seguinte maneira:
x^\mu = (x^0, x^1, x^2, x^3) = (ct, x, y, z)
Aqui, os superíndices não denotam potências, mas indicam as características de cada coordenada. A coordenada com superíndice 0 representa a dimensão temporal, enquanto que as coordenadas com superíndices 1, 2 e 3 correspondem às dimensões espaciais. Com isso em mente, as rotações puramente espaciais no espaço-tempo de Minkowski são descritas pelas seguintes relações:
Rotação em relação ao plano xy: \underbrace{\left(\begin{array}{r} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & \sin(\theta) & 0 \\ 0 & -\sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{xy}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{c} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotação em relação ao plano yz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ {} 0 & 1 & 0 & 0 \\ 0 & 0 & \cos(\theta) & \sin(\theta) \\ 0 & 0 & -\sin(\theta) & \cos(\theta) \end{array}\right)}_{\large{{R_{yz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Rotação em relação ao plano xz: \underbrace{\left(\begin{array}{c} x^{\prime 0} \\ {}x^{\prime 1} \\ x^{\prime 2} \\ x^{\prime 3} \end{array}\right)}_{\large{x^{\prime \mu}}} = \underbrace{\left(\begin{array}{cccc} 1 & 0 & 0 & 0 \\ 0 & \cos(\theta) & 0 & \sin(\theta) \\ 0 & 0 & 1 & 0 \\ 0 & -\sin(\theta) & 0 & \cos(\theta) \end{array}\right)}_{\large{{R_{xz}(\theta)^\mu}_\nu}} \underbrace{\left(\begin{array}{r} x^0 \\ {} x^1 \\ x^2 \\ x^3 \end{array}\right)}_{\large{x^{\nu}}}
Estas transformações mantêm exatamente as mesmas propriedades que suas homólogas em três dimensões.
Rotações hiperbólicas de espaço-tempo
Introduzindo o parâmetro de velocidade
A semelhança entre as transformações de Lorentz e uma rotação espacial pode ser obtida introduzindo o que chamamos de parâmetro de velocidade
\psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}).
Dado que \beta_{ss^\prime_x}\in]-1,1[, tem-se que \psi_{ss^\prime_x}\in\mathbb{R}. Além disso, notemos que, a partir disso se terá que \gamma_{ss^\prime_x}=\cosh(\psi_{ss^\prime_x}) e \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}). Isso se obtém a partir dos seguintes cálculos:
É claro que \psi_{ss^\prime_x}= \text{argtanh}(\beta_{ss^\prime_x}) é equivalente a dizer \beta_{ss^\prime_x} =\tanh(\psi_{ss^\prime_x}); e portanto:
\begin{array}{rl} \gamma^2_{ss^\prime_x} &= \dfrac{1}{1-\beta^2_{ss^\prime_x}} \\ \\ & = \dfrac{1}{1-\tanh^2(\psi_{ss^\prime_x})} \\ \\ {} & = \dfrac{\cosh^2(\psi_{ss^\prime_x})}{\cosh^2(\psi_{ss^\prime_x}) - \sinh^2(\psi_{ss^\prime_x})} \\ \\ & = \cosh^2(\psi_{ss^\prime_x}) \end{array}
Como tanto o fator gama como o cosseno hiperbólico são sempre maiores ou iguais a 1, fica demonstrado finalmente que \gamma_{ss^\prime_x} = \cosh(\psi_{ss^\prime_x}).
De forma semelhante continuando os cálculos realizados anteriormente, tem-se:
\gamma^2_{ss^\prime_x} \beta^2_{ss^\prime_x} = \cosh^2(\psi_{ss^\prime_x}) \tanh^2(\psi_{ss^\prime_x})= \sinh^2(\psi_{ss^\prime_x}).
E portanto \gamma_{ss^\prime_x} \beta_{ss^\prime_x} = \sinh(\psi_{ss^\prime_x}).
Formulando as Rotações Espaço-Temporais como Rotações Hiperbólicas
Tendo chegado a este ponto, agora podemos reescrever o fator associado ao boost de velocidade e o fator gama utilizando o parâmetro de velocidade nas transformações de Lorentz. Considerando dois sistemas inerciais S e S^\prime em configuração padrão, onde ao segundo se aplica um boost sobre o eixo x, \beta_{ss^\prime_x}, tem-se:
\begin{array}{rl} ct^\prime &= \gamma_{ss^\prime_x}(ct - \beta_{ss^\prime_x} x) \\ &= \gamma_{ss^\prime_x} ct - \gamma_{ss^\prime_x}\beta_{ss^\prime_x} x \\ &= ct\cosh(\psi_{ss^\prime_x}) - x\sinh(\psi_{ss^\prime_x}), \\ \\ x^\prime &= \gamma_{ss^\prime_x}(x - \beta_{ss^\prime_x} ct) \\ &= -\gamma_{ss^\prime_x}\beta_{ss^\prime_x} ct + \gamma_{ss^\prime_x}x \\ &= -ct \sinh(\psi_{ss^\prime_x}) + x\cosh(\psi_{ss^\prime_x}), \\ \\ y^\prime &= y, \\ \\ z^\prime &= z. \end{array}
Este sistema de equações admite a seguinte representação matricial:
Rotação Hiperbólica de Espaço-Tempo sobre o Plano tx:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_x}) & -\sinh(\psi_{ss^\prime_x}) & 0 & 0 \\ - \sinh(\psi_{ss^\prime_x}) & \cosh(\psi_{ss^\prime_x}) & 0 & 0 \\ {} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{tx}(\psi_{ss^\prime_x})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
De maneira análoga, temos rotações hiperbólicas sobre cada um dos planos de espaço-tempo:
Rotação Hiperbólica de Espaço-Tempo sobre o Plano ty:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left(\begin{array}{cccc} \cosh(\psi_{ss^\prime_y}) & 0 & -\sinh(\psi_{ss^\prime_y}) & 0 \\ 0 & 1 & 0 & 0 \\ {} - \sinh(\psi_{ss^\prime_y}) & 0 & \cosh(\psi_{ss^\prime_y}) & 0 \\ 0 & 0 & 0 & 1 \end{array}\right)}_{\large{{R_{ty}(\psi_{ss^\prime_y})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Rotação Hiperbólica de Espaço-Tempo sobre o Plano tz:
\begin{array}{rl} \underbrace{\left( \begin{array}{c} ct^\prime \\ x^\prime \\ y^\prime \\ z^\prime \end{array} \right)}_{\large{x^{\prime \mu}}} &= \underbrace{\left( \begin{array}{cccc} \cosh(\psi_{ss^\prime_z}) & 0 & 0 & -\sinh(\psi_{ss^\prime_z}) \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {} - \sinh(\psi_{ss^\prime_z}) & 0 & 0 & \cosh(\psi_{ss^\prime_z}) \end{array}\right)}_{\large{{R_{tz}(\psi_{ss^\prime_z})^\mu}_\nu}} \underbrace{\left( \begin{array}{c} ct \\ x \\ y \\ z \end{array} \right)}_{\large{x^{\nu}}} \end{array}
Por sua forma e propriedades algébricas, estas transformações são muito similares a uma rotação espacial, apenas que em vez de usar funções trigonométricas, utilizam funções hiperbólicas. Embora não sejam rotações no sentido estrito, mantêm certa analogia com as rotações revisadas no início. Por exemplo, de maneira similar a como ocorre com as rotações, a transformação inversa se obtém substituindo o parâmetro de velocidade correspondente \psi por -\psi. Estas transformações são às vezes denominadas como rotações hiperbólicas, e o parâmetro de velocidade é conhecido também como ângulo hiperbólico.
Conclusões
Até agora abordamos de maneira exaustiva o conceito das rotações no espaço-tempo de Minkowski, o que nos permite ter uma compreensão mais profunda das transformações de Lorentz. Através deste estudo, alcançamos os seguintes pontos chave:
- Reinterpretação das Transformações de Lorentz: Aprendemos a visualizar e compreender as transformações de Lorentz não apenas como mudanças nas coordenadas devido a diferentes referenciais, mas também como rotações no espaço-tempo.
- Compreensão das Rotações no Espaço-Tempo de Minkowski: Examinamos detalhadamente as rotações dentro do espaço de quatro dimensões de Minkowski.
- Exploração das Rotações Hiperbólicas de Espaço-Tempo: Finalmente, introduzimos o conceito de rotações hiperbólicas de espaço-tempo, examinando suas semelhanças com as rotações espaciais usuais.