
Grundlagen der Kinematik: Position, Geschwindigkeit und Beschleunigung
Zusammenfassung:
In dieser Vorlesung werden wir die grundlegenden Konzepte der Kinematik behandeln: Position, Geschwindigkeit und Beschleunigung. Wir untersuchen, wie man die Position in Abhängigkeit von der Zeit darstellt, und unterscheiden zwischen momentaner und mittlerer Geschwindigkeit sowie Beschleunigung. Außerdem leiten wir die Bewegungsgleichungen mit konstanter Beschleunigung her, die für die Vorhersage von Position und Geschwindigkeit eines Objekts unerlässlich sind.
LERNZIELE:
Am Ende dieser Vorlesung werden die Studierenden in der Lage sein:
- Die grundlegenden Definitionen von Position, Geschwindigkeit und Beschleunigung in der Kinematik zu erinnern.
- Die Beziehungen zwischen Beschleunigung, Geschwindigkeit und Position zu analysieren.
- Ableitungen und Integrale anzuwenden, um Geschwindigkeit und Position aus der Beschleunigung zu berechnen und umgekehrt.
- Den Unterschied zwischen momentaner und mittlerer Geschwindigkeit sowie zwischen momentaner und mittlerer Beschleunigung zu verstehen.
INHALTSVERZEICHNIS
Einführung
Position, Raum und Beobachter
Geschwindigkeit und Schnelligkeit
Beschleunigung
Bewegungsgleichungen
Schlussfolgerung
Einführung
Ausgehend von der Beschleunigung ist es möglich, die Geschwindigkeit und die Position durch Integration in Bezug auf die Zeit zu berechnen, und ausgehend von der Position können wir die Geschwindigkeit und die Beschleunigung durch Differentiation in Bezug auf die Zeit berechnen. Diese Worte fassen zusammen, was wir über die Kinematik untersuchen werden, und eines unserer Hauptziele wird es sein, die Bedeutung dieser Begriffe zu verstehen. Die Bewegung stellt eine Form der Veränderung dar, und alles in der Natur ist Veränderungen unterworfen. Daher ist das Studium der Veränderung und ihrer Variationen eine der grundlegenden Säulen der Physik.
Es gibt viele veränderliche Größen: das Neue wird alt, man kann von einem Beruf zu einem anderen wechseln, von gesund zu krank und umgekehrt, sowie vom Tag zur Nacht und vieles mehr. All dies sind Beispiele für Veränderungen, aber beim Studium der Kinematik konzentrieren wir uns auf eine ganz bestimmte: die Veränderung der Position oder die Bewegung. Beim Studium der Bewegung können wir zwei komplementäre Ansätze unterscheiden: einen, der auf den Ursachen beruht, die sie hervorrufen, und einen anderen, der sich auf die Art und Weise konzentriert, wie sie sich entwickelt. Dies führt zur Dynamik und zur Kinematik, die zusammen die Mechanik bilden.
In der Physik modellieren wir den physikalischen Raum als einen Vektorraum, um die mathematische Darstellung von Konzepten wie Position, Geschwindigkeit und Beschleunigung zu erleichtern. Üblicherweise verwenden wir dafür den dreidimensionalen Raum \mathbb{R}^3, obwohl theoretisch Räume beliebiger Dimensionen je nach Kontext geeignet sein können.
Position, Raum und Beobachter
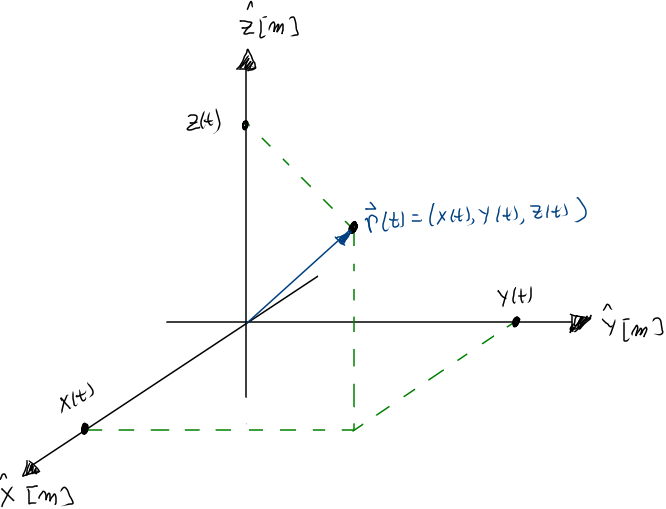
\begin{array}{rll} \vec{r}:\mathbb{R}[T]&\longrightarrow&\mathbb{R}^n[L] \\ t &\longmapsto&\vec{r}(t) \end{array}
Dies ist eine Funktion, die jeder Zeit t\in\mathbb{R} eine Position \vec{r}(t) zuordnet, und daher sagen wir, dass es sich um eine Positionsfunktion (oder einfach Position) handelt. Die unabhängige Variable t wird „Zeit“ genannt, und der Parameter n entspricht der „Dimension“ des Raumes. Die Symbole [T] und [L] beziehen sich auf die physikalischen Dimensionen Zeit und Länge, die üblicherweise in „Sekunden“ bzw. „Metern“ gemessen werden.
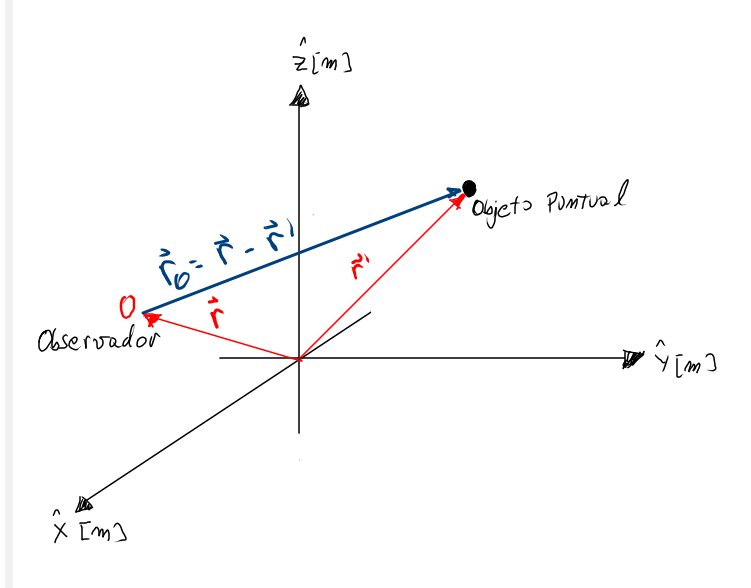
Die Position wird, wie jede physikalische Größe, von einem Beobachter gemessen. In der Beschreibung, die ich von der Position gegeben habe, habe ich implizit angenommen, dass der Beobachter die Koordinaten des Nullvektors \vec{0} hat. Wenn der Beobachter \mathcal{O} die Koordinaten des Vektors \vec{r} hat und das Punktobjekt die Koordinaten \vec{r}^\prime, besitzt, dann ist die Position relativ zum Beobachter gegeben durch:
\vec{r}_\mathcal{O} = \vec{r} - \vec{r}^\prime
Der Raum ist die Menge aller möglichen Positionen; er ist auch die Menge aller möglichen Positionen relativ zu einem beliebigen Beobachter. Die Position ist eine Funktion der Zeit und wird verwendet, um mathematisch den Ort darzustellen, an dem sich ein ideales Objekt, das „Punktobjekt“ genannt wird, zu jedem Zeitpunkt t befindet. Das Punktobjekt ist eine Idealisierung; es ist das, was von einem realen Objekt übrig bleibt, wenn wir es von allen seinen Eigenschaften, einschließlich Größe und Form, entkleiden und nur den „Ort, den es im Raum einnimmt,“ beibehalten.
Die Position ist im Allgemeinen ein Vektor. Vektoren bestehen aus zwei Elementen: Betrag und Richtung. Der Betrag der Position relativ zu einem Beobachter ist der Abstand zum Beobachter und wird durch dist_\mathcal{O}(t)=\|\vec{r}_\mathcal{O}(t)\|. angegeben.
Ab diesem Punkt ist es sehr empfehlenswert, die Inhalte des Kurses Differenzialrechnung und Integralrechnung zu beherrschen.
Schnelligkeit und Geschwindigkeit
Wenn die Position bezüglich der Zeit differenzierbar ist, dann ist es möglich, die Geschwindigkeit relativ zu einem Beobachter \mathcal{O}, \vec{v}_\mathcal{O}(t), folgendermaßen zu definieren:
\vec{v}_\mathcal{O}(t) =\displaystyle \lim_{\Delta t \to 0}\frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{r}_\mathcal{O}(t)}{dt}
Einfach ausgedrückt: Die Geschwindigkeit ist die zeitliche Ableitung der Position und gibt uns an, wie sich die Position zu jedem Zeitpunkt t verändert.
Es gibt zwei Arten von Geschwindigkeiten: die momentane und die mittlere. Die momentane Geschwindigkeit ist die soeben dargestellte; die mittlere Geschwindigkeit erhält man, wenn man die Grenzwertbildung weglässt. Die mittlere Geschwindigkeit über das Zeitintervall der Länge \Delta t, \left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>, wird definiert als
\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{r}_\mathcal{O}(t+\Delta t) - \vec{r}_\mathcal{O}(t)}{\Delta t}
wobei \overline{t} ein beliebiger Zeitpunkt innerhalb des Intervalls [t,t+\Delta t] ist.
Ausgehend von der Geschwindigkeit (sei es momentane oder mittlere) wird die Schnelligkeit als ihr entsprechender Betrag definiert. Die Schnelligkeit relativ zu einem Beobachter \mathcal{O} ist v_\mathcal{O}(t)=\|\vec{v}_\mathcal{O}(t)\|, und die mittlere Schnelligkeit \left< {v}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \|\left< \vec{v}_{\mathcal{O},\Delta t}(\overline{t}) \right>\|.
Schnelligkeit und Geschwindigkeit werden in Einheiten von Länge pro Zeiteinheit gemessen, [L/T], üblicherweise in „Metern pro Sekunde“.
Beschleunigung
Ähnlich wie die Geschwindigkeit, wenn sie bezüglich der Zeit differenzierbar ist, dann ist es möglich, das Konzept der Beschleunigung relativ zu einem Beobachter \mathcal{O}, \vec{a}_\mathcal{O}(t), folgendermaßen zu definieren:
\vec{a}_\mathcal{O}(t)= \displaystyle \lim_{\Delta t \to 0}\frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t} = \frac{d\vec{v}_\mathcal{O}(t)}{dt}
Die Beschleunigung ist die zeitliche Ableitung der Geschwindigkeit und gibt uns folglich an, wie sich die Geschwindigkeit im Laufe der Zeit verändert.
Ähnlich wie bei der Schnelligkeit gibt es die momentane Beschleunigung und die mittlere Beschleunigung. Die momentane Beschleunigung ist diejenige, die wir gerade betrachtet haben; die mittlere Beschleunigung erhält man, wenn man die Grenzwertbildung weglässt. Die mittlere Beschleunigung über das Zeitintervall der Länge \Delta t, \left<\vec{a}_{\mathcal{O},\Delta t}\right>, wird definiert als
\left< \vec{a}_{\mathcal{O},\Delta t}(\overline{t}) \right> = \displaystyle \frac{\vec{v}_\mathcal{O}(t+\Delta t) - \vec{v}_\mathcal{O}(t)}{\Delta t}
Die Beschleunigung wird in Einheiten von Länge pro Zeit zum Quadrat gemessen, [L/T^2], üblicherweise in „Metern pro Sekunde zum Quadrat“.
Bewegungsgleichungen
Nehmen wir an, wir haben ein Punktobjekt, das sich relativ zu einem Beobachter \mathcal{O} mit einer konstanten Beschleunigung \vec{a}_\mathcal{O}(t) = \vec{a}_0 bewegt. Wenn es möglich ist, Geschwindigkeit und Beschleunigung aus der Position abzuleiten, dann ist es ebenso möglich, aus der Beschleunigung die Geschwindigkeit und die Position durch Integration zu berechnen. Die auf diese Weise gewonnenen Ergebnisse sind als Bewegungsgleichungen bekannt.
Durch Integration von \vec{a}_\mathcal{O}(t) = \vec{a}_0 erhalten wir:
\vec{v}_\mathcal{O}(t) = \displaystyle \int \vec{a}_\mathcal{O}(t) dt = \int \vec{a}_0 dt = \vec{a}_0 t + \vec{v}_0
Und durch eine weitere Integration erhalten wir
\vec{r}_\mathcal{O}(t) = \displaystyle \int \vec{v}_\mathcal{O}(t) dt = \int \vec{a}_0t + \vec{v}_0 dt = \displaystyle \frac{1}{2}\vec{a}_0 t^2 + \vec{v}_0t+\vec{r}_0
Hier sind die Konstanten \vec{v}_0 und \vec{r}_0 Integrationskonstanten, die die Anfangsgeschwindigkeit und die Anfangsposition des Punktobjekts relativ zum Beobachter \mathcal{O} darstellen. Zusammenfassend lauten die Bewegungsgleichungen:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) =& \vec{a}_0 \\ \vec{v}_\mathcal{O}(t) =& \vec{a}_0t+\vec{v}_0 \\ \vec{r}_\mathcal{O}(t) =& \displaystyle \frac{1}{2}\vec{a}_0t^2 + \vec{v}_0t + \vec{r}_0 \end{array}
Mit diesen Gleichungen ist es möglich, die Bewegung jedes Punktobjekts, das sich mit konstanter Beschleunigung bewegt, vollständig zu beschreiben. Dies zeigt, dass es möglich ist, aus der Beschleunigung die Geschwindigkeit und die Position durch Integration zu berechnen und aus der Position die Geschwindigkeit und die Beschleunigung durch Differentiation zu bestimmen.
Es ist zu beachten, dass es sich hierbei um Vektorgleichungen handelt, die daher in ihre Komponenten zerlegt werden können. Wenn wir eine Bewegung in einem dreidimensionalen Raum modellieren, dann haben wir jede Komponente getrennt wie folgt:
\begin{array}{rl} \vec{a}_\mathcal{O}(t) &= (a_x(t), a_y(t), a_z(t))\\ \vec{v}_\mathcal{O}(t) &= (v_x(t), v_y(t), v_z(t))\\ \vec{r}_\mathcal{O}(t) &= (x(t), y(t), z(t))\\ \vec{a}_0 &= (a_{0x}, a_{0y}, a_{0z})\\ \vec{v}_0 &= (v_{0x}, v_{0y}, v_{0z})\\ \vec{r}_0 &= (x_{0}, y_{0}, z_{0})\\ \end{array}
Auf diese Weise entsteht ein Satz von 9 Gleichungen, eine für jede Koordinatenachse. Zum Beispiel haben wir für die Achse \hat{x}
\begin{array}{rl} a_x(t) & = a_{0x}\\ v_x(t) & = a_{0x}t + v_{0x} \\ x(t) & = \displaystyle \frac{1}{2}a_{0x}t^2 + v_{0x}t + x_0 \end{array}
In der Regel wird die Koordinate \hat{z} für die Höhe reserviert, sodass angenommen wird, dass a_{0z}=-g \approx -9.81[m/s^2]; das heißt, die Beschleunigung in dieser Achse wird mit der durch die Erdgravitation erzeugten Beschleunigung in Verbindung gebracht. Dies wird in die Gleichungen aufgenommen, um Phänomene wie den freien Fall oder den Wurf eines Projektils zu modellieren.
Schlussfolgerung
In diesem Überblick über die Grundlagen der Kinematik haben wir untersucht, wie die Mathematik verwendet wird, um die Bewegung im physikalischen Raum zu beschreiben und zu verstehen. Von der Darstellung der Position als Vektor in einem Raum beliebiger Dimension bis hin zur Differentiation und Integration von Vektorfunktionen zur Bestimmung von Geschwindigkeit, Beschleunigung und Bewegungsgleichungen haben wir gesehen, wie sich diese Konzepte miteinander verknüpfen und im Bewegungsanalyse angewendet werden.
Die Kinematik, die die Bewegung untersucht, ohne die Ursachen zu berücksichtigen, die sie hervorrufen, bietet uns eine reine und mathematisch elegante Perspektive auf die Bewegung von Punktobjekten. Mit den Werkzeugen der Differential- und Integralrechnung können wir Bewegungsmuster entschlüsseln und zukünftige Trajektorien vorhersagen, was in vielen Bereichen der Physik und des Ingenieurwesens von wesentlicher Bedeutung ist.
Schließlich führt uns die Einbeziehung der durch die Schwerkraft verursachten Beschleunigung in unsere Gleichungen zu konkreteren Anwendungen wie dem freien Fall und dem Wurf von Projektilen. Dies zeigt die Relevanz und Anwendbarkeit der Kinematik in unserer alltäglichen Welt. Daher ist das Studium der Kinematik nicht nur eine theoretische Übung, sondern ein fundamentales Werkzeug, um die physikalische Welt um uns herum zu verstehen und zu beeinflussen.